 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSVAM: Saliency-guided Visual Attention Modeling by Autonomous Underwater Robots
Paper and Code
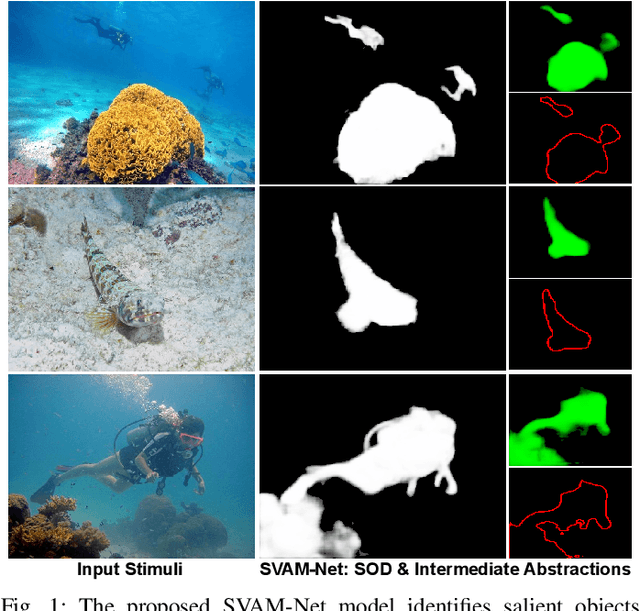
This paper presents a holistic approach to saliency-guided visual attention modeling (SVAM) for use by autonomous underwater robots. Our proposed model, named SVAM-Net, integrates deep visual features at various scales and semantics for effective salient object detection (SOD) in natural underwater images. The SVAM-Net architecture is configured in a unique way to jointly accommodate bottom-up and top-down learning within two separate branches of the network while sharing the same encoding layers. We design dedicated spatial attention modules (SAMs) along these learning pathways to exploit the coarse-level and fine-level semantic features for SOD at four stages of abstractions. The bottom-up branch performs a rough yet reasonably accurate saliency estimation at a fast rate, whereas the deeper top-down branch incorporates a residual refinement module (RRM) that provides fine-grained localization of the salient objects. Extensive performance evaluation of SVAM-Net on benchmark datasets clearly demonstrates its effectiveness for underwater SOD. We also validate its generalization performance by several ocean trials' data that include test images of diverse underwater scenes and waterbodies, and also images with unseen natural objects. Moreover, we analyze its computational feasibility for robotic deployments and demonstrate its utility in several important use cases of visual attention modeling.