 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIDE-Net: Interactive Driving Event and Pattern Extraction from Human Data
Paper and Code
Nov 04, 2020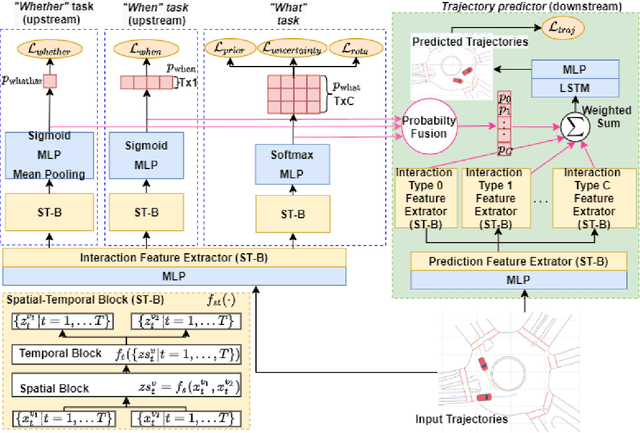
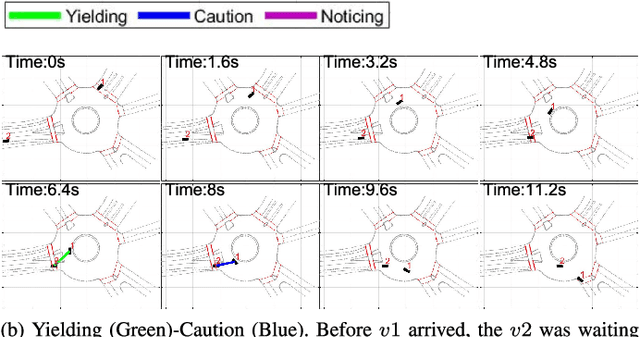
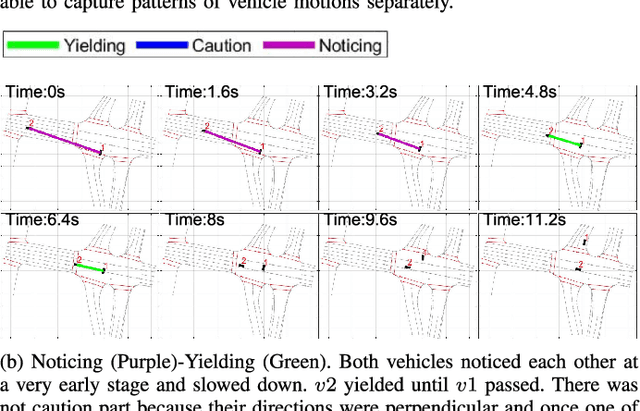
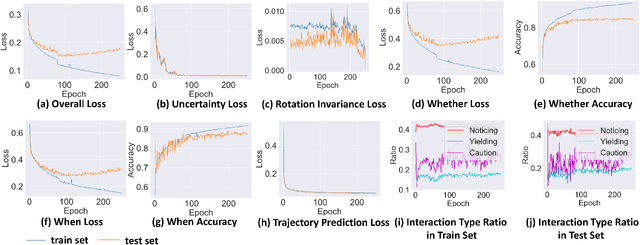
Autonomous vehicles (AVs) need to share the road with multiple, heterogeneous road users in a variety of driving scenarios. It is overwhelming and unnecessary to carefully interact with all observed agents, and AVs need to determine whether and when to interact with each surrounding agent. In order to facilitate the design and testing of prediction and planning modules of AVs, in-depth understanding of interactive behavior is expected with proper representation, and events in behavior data need to be extracted and categorized automatically. Answers to what are the essential patterns of interactions are also crucial for these motivations in addition to answering whether and when. Thus, learning to extract interactive driving events and patterns from human data for tackling the whether-when-what tasks is of critical importance for AVs. There is, however, no clear definition and taxonomy of interactive behavior, and most of the existing works are based on either manual labelling or hand-crafted rules and features. In this paper, we propose the Interactive Driving event and pattern Extraction Network (IDE-Net), which is a deep learning framework to automatically extract interaction events and patterns directly from vehicle trajectories. In IDE-Net, we leverage the power of multi-task learning and proposed three auxiliary tasks to assist the pattern extraction in an unsupervised fashion. We also design a unique spatial-temporal block to encode the trajectory data. Experimental results on the INTERACTION dataset verified the effectiveness of such designs in terms of better generalizability and effective pattern extraction. We find three interpretable patterns of interactions, bringing insights for driver behavior representation, modeling and comprehension. Both objective and subjective evaluation metrics are adopted in our analysis of the learned patterns.