 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSocially-Compatible Behavior Design of Autonomous Vehicles with Verification on Real Human Data
Paper and Code
Nov 10, 2020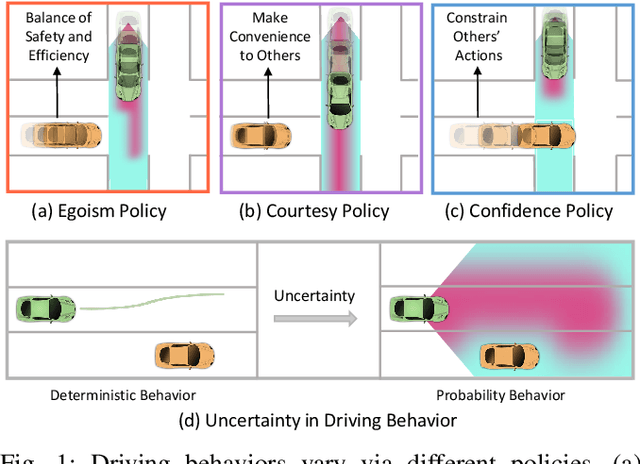
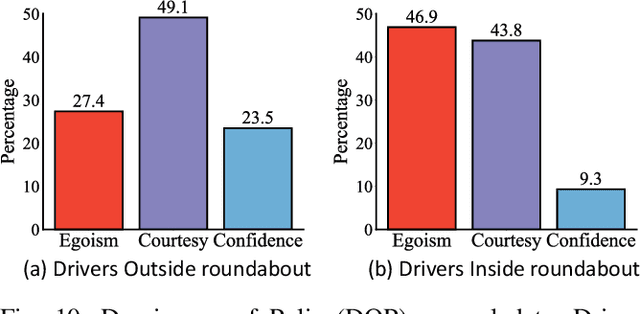
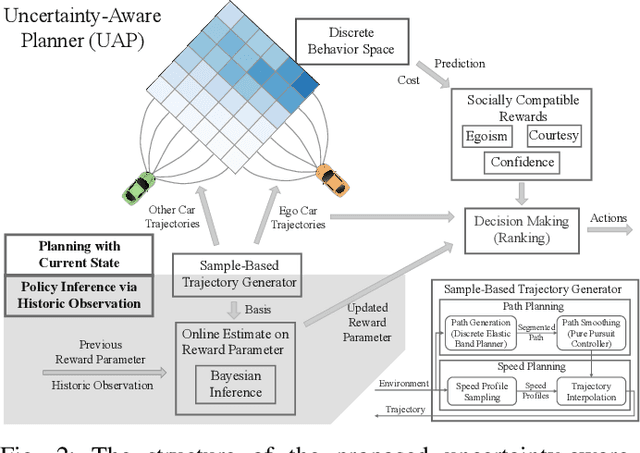
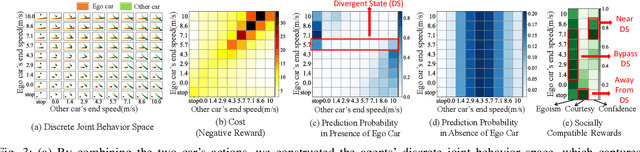
As more and more autonomous vehicles (AVs) are being deployed on public roads, designing socially compatible behaviors for them is of critical importance. Based on observations, AVs need to predict the future behaviors of other traffic participants, and be aware of the uncertainties associated with such prediction so that safe, efficient, and human-like motions can be generated. In this paper, we propose an integrated prediction and planning framework that allows the AVs to online infer the characteristics of other road users and generate behaviors optimizing not only their own rewards, but also their courtesy to others, as well as their confidence on the consequences in the presence of uncertainties. Based on the definitions of courtesy and confidence, we explore the influences of such factors on the behaviors of AVs in interactive driving scenarios. Moreover, we evaluate the proposed algorithm on naturalistic human driving data by comparing the generated behavior with the ground truth. Results show that the online inference can significantly improve the human-likeness of the generated behaviors. Furthermore, we find that human drivers show great courtesy to others, even for those without right-of-way.