 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBP-RRT: Barrier Pair Synthesis for Temporal Logic Motion Planning
Paper and Code
Sep 05, 2020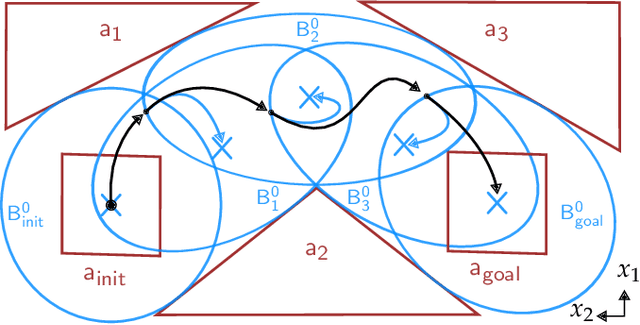
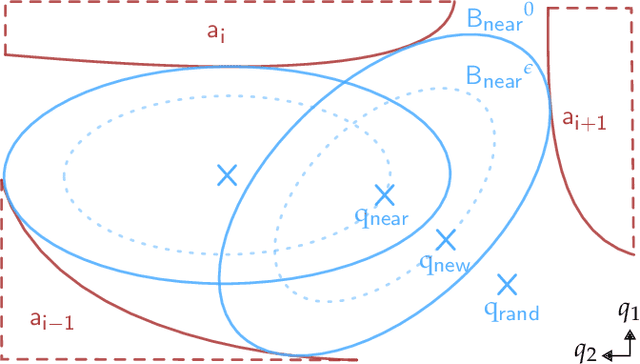
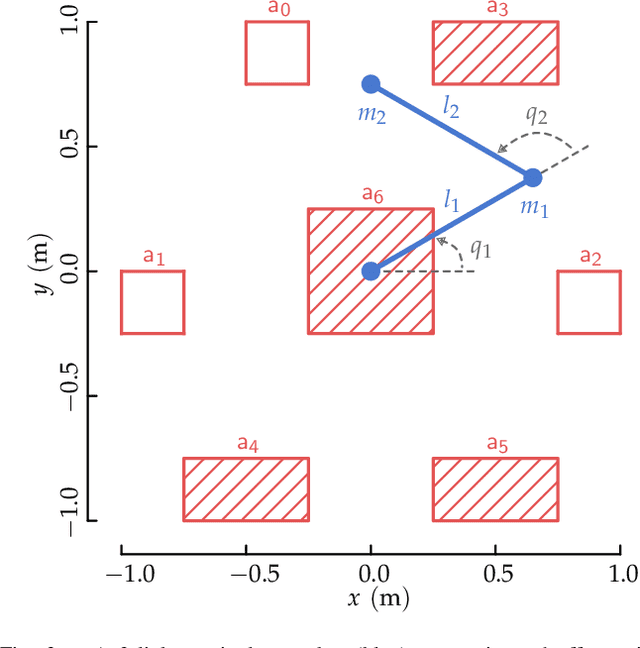
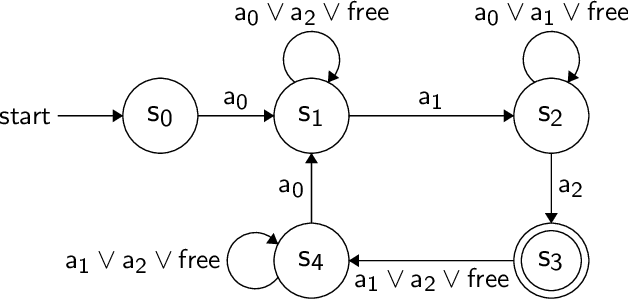
For a nonlinear system (e.g. a robot) with its continuous state space trajectories constrained by a linear temporal logic specification, the synthesis of a low-level controller for mission execution often results in a non-convex optimization problem. We devise a new algorithm to solve this type of non-convex problems by formulating a rapidly-exploring random tree of barrier pairs, with each barrier pair composed of a quadratic barrier function and a full state feedback controller. The proposed method employs a rapid-exploring random tree to deal with the non-convex constraints and uses barrier pairs to fulfill the local convex constraints. As such, the method solves control problems fulfilling the required transitions of an automaton in order to satisfy given linear temporal logic constraints. At the same time it synthesizes locally optimal controllers in order to transition between the regions corresponding to the alphabet of the automaton. We demonstrate this new algorithm on a simulation of a two linkage manipulator robot.