 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIDOL: A Framework for IMU-DVS Odometry using Lines
Paper and Code
Aug 13, 2020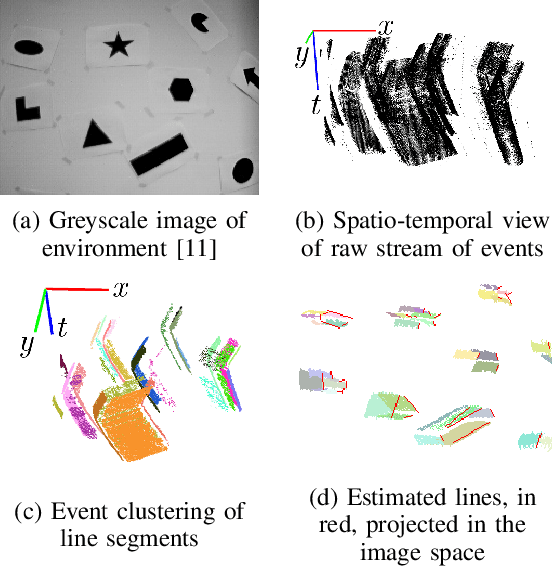
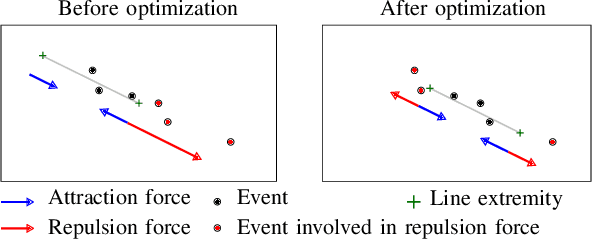
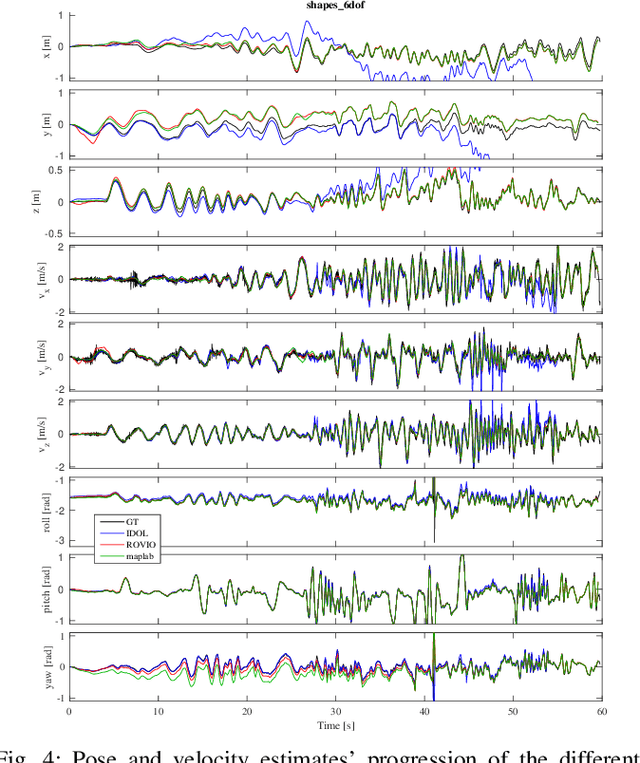
In this paper, we introduce IDOL, an optimization-based framework for IMU-DVS Odometry using Lines. Event cameras, also called Dynamic Vision Sensors (DVSs), generate highly asynchronous streams of events triggered upon illumination changes for each individual pixel. This novel paradigm presents advantages in low illumination conditions and high-speed motions. Nonetheless, this unconventional sensing modality brings new challenges to perform scene reconstruction or motion estimation. The proposed method offers to leverage a continuous-time representation of the inertial readings to associate each event with timely accurate inertial data. The method's front-end extracts event clusters that belong to line segments in the environment whereas the back-end estimates the system's trajectory alongside the lines' 3D position by minimizing point-to-line distances between individual events and the lines' projection in the image space. A novel attraction/repulsion mechanism is presented to accurately estimate the lines' extremities, avoiding their explicit detection in the event data. The proposed method is benchmarked against a state-of-the-art frame-based visual-inertial odometry framework using public datasets. The results show that IDOL performs at the same order of magnitude on most datasets and even shows better orientation estimates. These findings can have a great impact on new algorithms for DVS.