 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMaximizing BCI Human Feedback using Active Learning
Paper and Code
Aug 11, 2020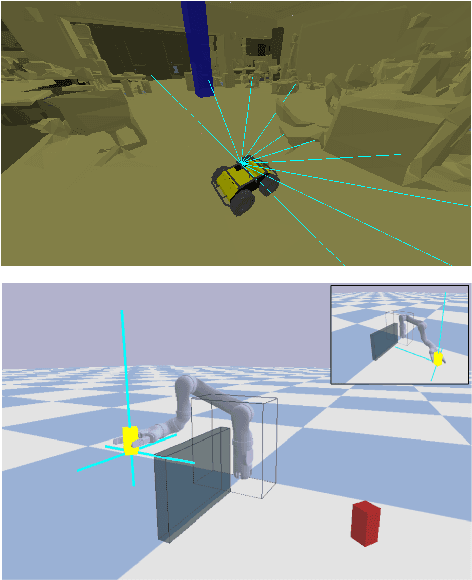
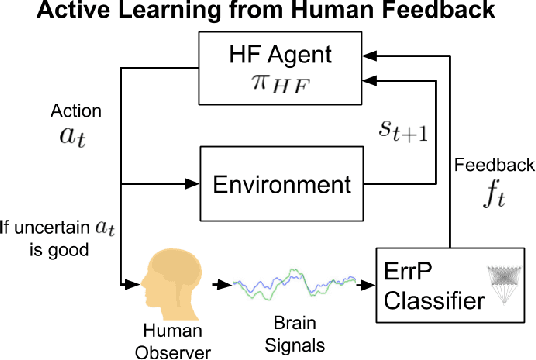
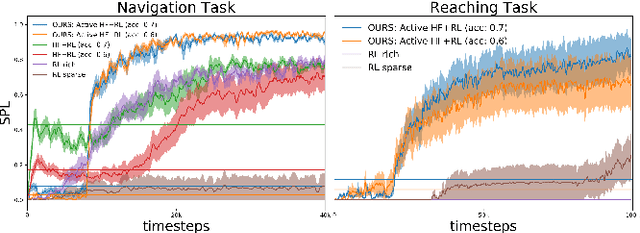
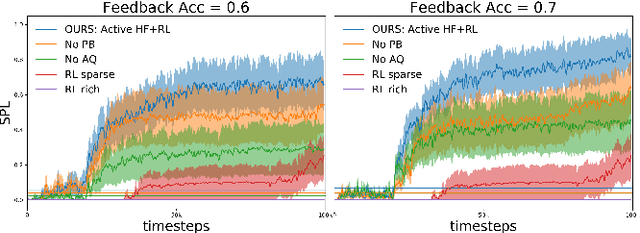
Recent advancements in \textit{Learning from Human Feedback} present an effective way to train robot agents via inputs from non-expert humans, without a need for a specially designed reward function. However, this approach needs a human to be present and attentive during robot learning to provide evaluative feedback. In addition, the amount of feedback needed grows with the level of task difficulty and the quality of human feedback might decrease over time because of fatigue. To overcome these limitations and enable learning more robot tasks with higher complexities, there is a need to maximize the quality of expensive feedback received and reduce the amount of human cognitive involvement required. In this work, we present an approach that uses active learning to smartly choose queries for the human supervisor based on the uncertainty of the robot and effectively reduces the amount of feedback needed to learn a given task. We also use a novel multiple buffer system to improve robustness to feedback noise and guard against catastrophic forgetting as the robot learning evolves. This makes it possible to learn tasks with more complexity using lesser amounts of human feedback compared to previous methods. We demonstrate the utility of our proposed method on a robot arm reaching task where the robot learns to reach a location in 3D without colliding with obstacles. Our approach is able to learn this task faster, with less human feedback and cognitive involvement, compared to previous methods that do not use active learning.