 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCascade Graph Neural Networks for RGB-D Salient Object Detection
Paper and Code
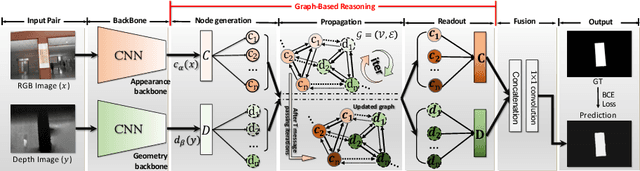
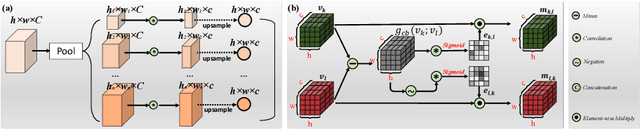

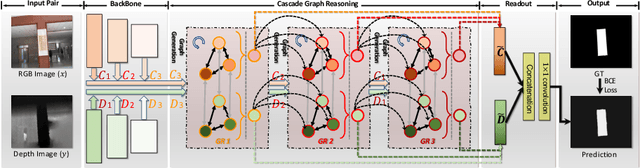
In this paper, we study the problem of salient object detection (SOD) for RGB-D images using both color and depth information.A major technical challenge in performing salient object detection fromRGB-D images is how to fully leverage the two complementary data sources. Current works either simply distill prior knowledge from the corresponding depth map for handling the RGB-image or blindly fuse color and geometric information to generate the coarse depth-aware representations, hindering the performance of RGB-D saliency detectors.In this work, we introduceCascade Graph Neural Networks(Cas-Gnn),a unified framework which is capable of comprehensively distilling and reasoning the mutual benefits between these two data sources through a set of cascade graphs, to learn powerful representations for RGB-D salient object detection. Cas-Gnn processes the two data sources individually and employs a novelCascade Graph Reasoning(CGR) module to learn powerful dense feature embeddings, from which the saliency map can be easily inferred. Contrast to the previous approaches, the explicitly modeling and reasoning of high-level relations between complementary data sources allows us to better overcome challenges such as occlusions and ambiguities. Extensive experiments demonstrate that Cas-Gnn achieves significantly better performance than all existing RGB-DSOD approaches on several widely-used benchmarks.