 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEpipolar-Guided Deep Object Matching for Scene Change Detection
Paper and Code
Jul 30, 2020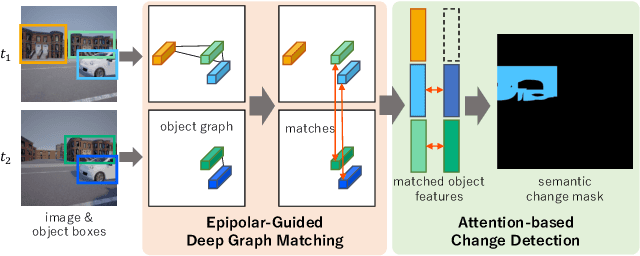
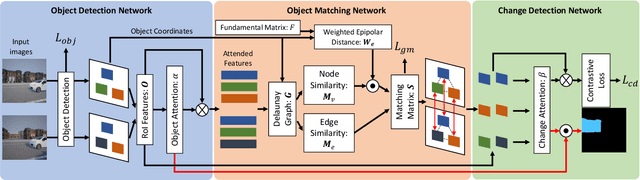
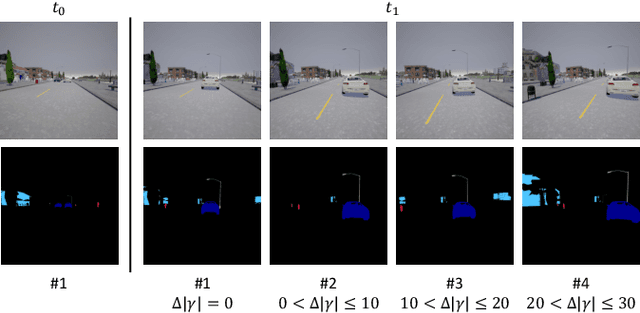
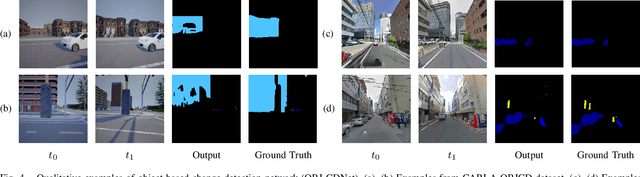
This paper describes a viewpoint-robust object-based change detection network (OBJ-CDNet). Mobile cameras such as drive recorders capture images from different viewpoints each time due to differences in camera trajectory and shutter timing. However, previous methods for pixel-wise change detection are vulnerable to the viewpoint differences because they assume aligned image pairs as inputs. To cope with the difficulty, we introduce a deep graph matching network that establishes object correspondence between an image pair. The introduction enables us to detect object-wise scene changes without precise image alignment. For more accurate object matching, we propose an epipolar-guided deep graph matching network (EGMNet), which incorporates the epipolar constraint into the deep graph matching layer used in OBJCDNet. To evaluate our network's robustness against viewpoint differences, we created synthetic and real datasets for scene change detection from an image pair. The experimental results verified the effectiveness of our network.