 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraph-PCNN: Two Stage Human Pose Estimation with Graph Pose Refinement
Paper and Code
Jul 21, 2020
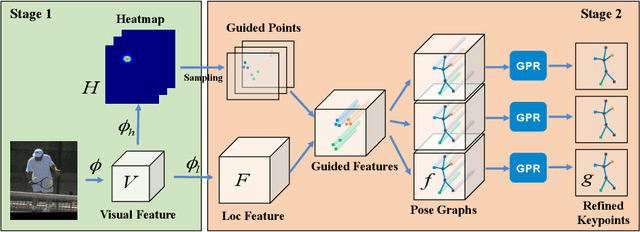
Recently, most of the state-of-the-art human pose estimation methods are based on heatmap regression. The final coordinates of keypoints are obtained by decoding heatmap directly. In this paper, we aim to find a better approach to get more accurate localization results. We mainly put forward two suggestions for improvement: 1) different features and methods should be applied for rough and accurate localization, 2) relationship between keypoints should be considered. Specifically, we propose a two-stage graph-based and model-agnostic framework, called Graph-PCNN, with a localization subnet and a graph pose refinement module added onto the original heatmap regression network. In the first stage, heatmap regression network is applied to obtain a rough localization result, and a set of proposal keypoints, called guided points, are sampled. In the second stage, for each guided point, different visual feature is extracted by the localization subnet. The relationship between guided points is explored by the graph pose refinement module to get more accurate localization results. Experiments show that Graph-PCNN can be used in various backbones to boost the performance by a large margin. Without bells and whistles, our best model can achieve a new state-of-the-art 76.8% AP on COCO test-dev split.