 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning-to-Fly: Learning-based Collision Avoidance for Scalable Urban Air Mobility
Paper and Code
Jun 23, 2020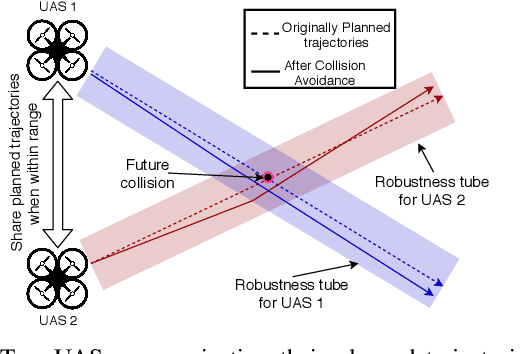
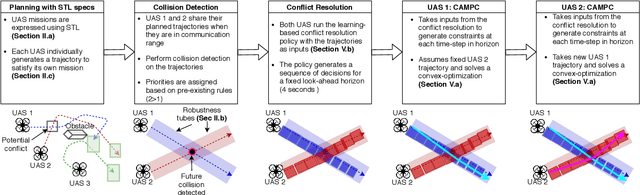
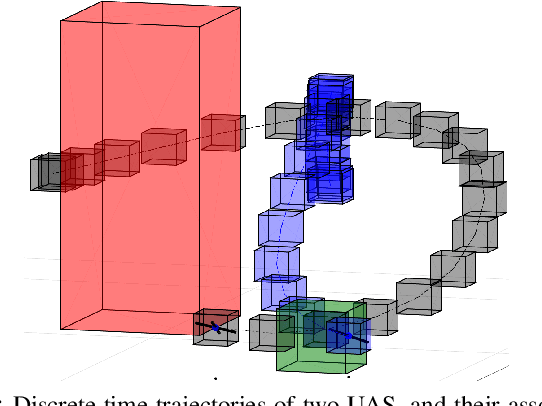
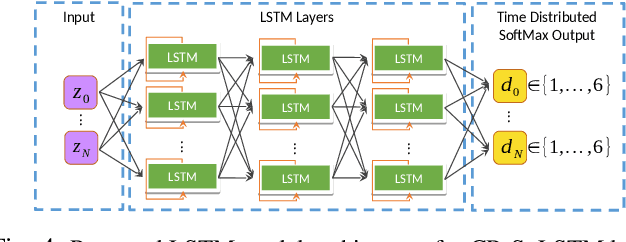
With increasing urban population, there is global interest in Urban Air Mobility (UAM), where hundreds of autonomous Unmanned Aircraft Systems (UAS) execute missions in the airspace above cities. Unlike traditional human-in-the-loop air traffic management, UAM requires decentralized autonomous approaches that scale for an order of magnitude higher aircraft densities and are applicable to urban settings. We present Learning-to-Fly (L2F), a decentralized on-demand airborne collision avoidance framework for multiple UAS that allows them to independently plan and safely execute missions with spatial, temporal and reactive objectives expressed using Signal Temporal Logic. We formulate the problem of predictively avoiding collisions between two UAS without violating mission objectives as a Mixed Integer Linear Program (MILP).This however is intractable to solve online. Instead, we develop L2F, a two-stage collision avoidance method that consists of: 1) a learning-based decision-making scheme and 2) a distributed, linear programming-based UAS control algorithm. Through extensive simulations, we show the real-time applicability of our method which is $\approx\!6000\times$ faster than the MILP approach and can resolve $100\%$ of collisions when there is ample room to maneuver, and shows graceful degradation in performance otherwise. We also compare L2F to two other methods and demonstrate an implementation on quad-rotor robots.