 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTask-Agnostic Online Reinforcement Learning with an Infinite Mixture of Gaussian Processes
Paper and Code


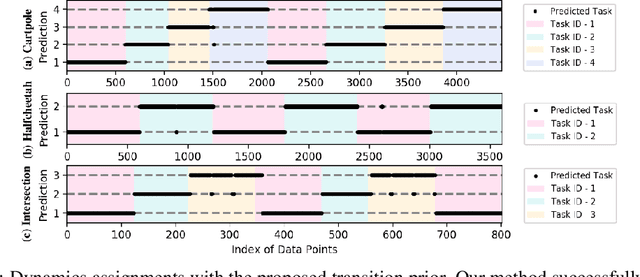
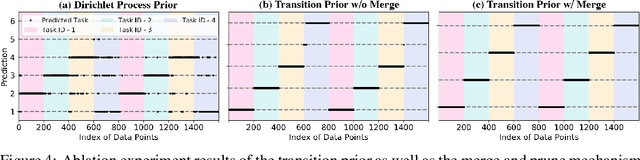
Continuously learning to solve unseen tasks with limited experience has been extensively pursued in meta-learning and continual learning, but with restricted assumptions such as accessible task distributions, independently and identically distributed tasks, and clear task delineations. However, real-world physical tasks frequently violate these assumptions, resulting in performance degradation. This paper proposes a continual online model-based reinforcement learning approach that does not require pre-training to solve task-agnostic problems with unknown task boundaries. We maintain a mixture of experts to handle nonstationarity, and represent each different type of dynamics with a Gaussian Process to efficiently leverage collected data and expressively model uncertainty. We propose a transition prior to account for the temporal dependencies in streaming data and update the mixture online via sequential variational inference. Our approach reliably handles the task distribution shift by generating new models for never-before-seen dynamics and reusing old models for previously seen dynamics. In experiments, our approach outperforms alternative methods in non-stationary tasks, including classic control with changing dynamics and decision making in different driving scenarios.