 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep R-Learning for Continual Area Sweeping
Paper and Code
May 31, 2020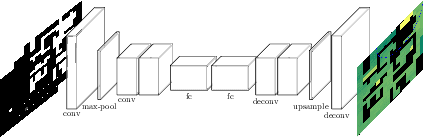
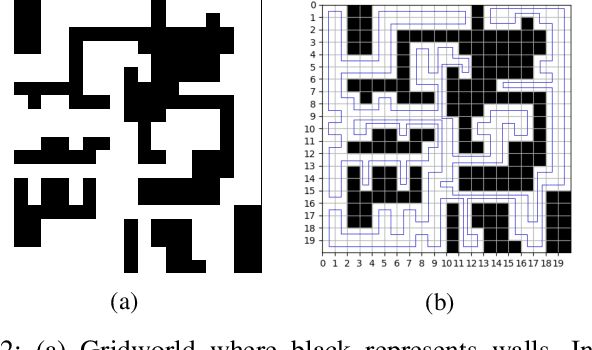
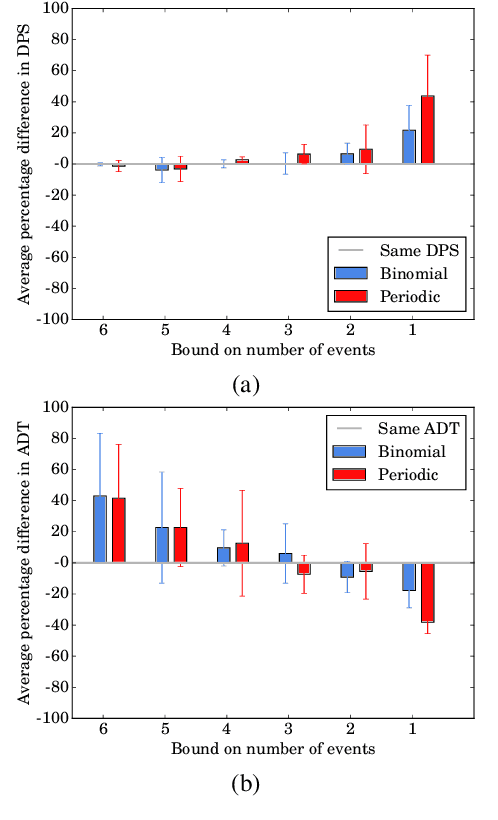
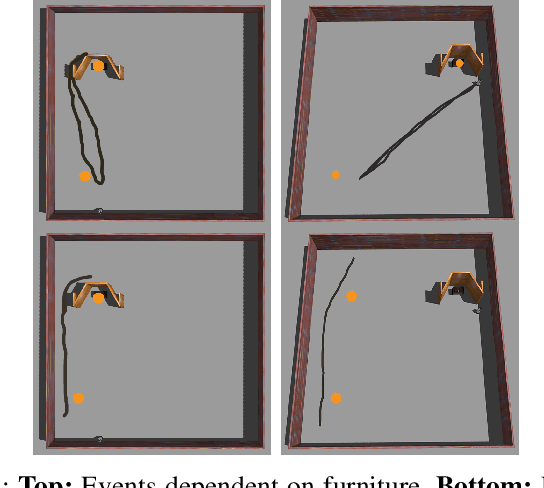
Coverage path planning is a well-studied problem in robotics in which a robot must plan a path that passes through every point in a given area repeatedly, usually with a uniform frequency. To address the scenario in which some points need to be visited more frequently than others, this problem has been extended to non-uniform coverage planning. This paper considers the variant of non-uniform coverage in which the robot does not know the distribution of relevant events beforehand and must nevertheless learn to maximize the rate of detecting events of interest. This continual area sweeping problem has been previously formalized in a way that makes strong assumptions about the environment, and to date only a greedy approach has been proposed. We generalize the continual area sweeping formulation to include fewer environmental constraints, and propose a novel approach based on reinforcement learning in a Semi-Markov Decision Process. This approach is evaluated in an abstract simulation and in a high fidelity Gazebo simulation. These evaluations show significant improvement upon the existing approach in general settings, which is especially relevant in the growing area of service robotics.