 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrajectory Prediction for Autonomous Driving based on Multi-Head Attention with Joint Agent-Map Representation
Paper and Code
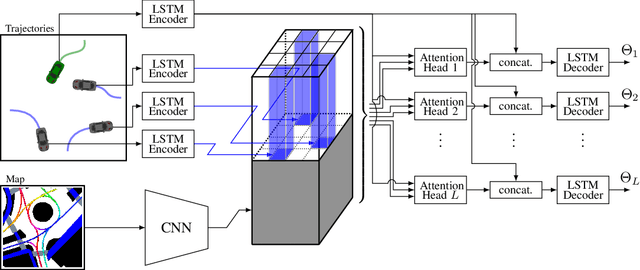

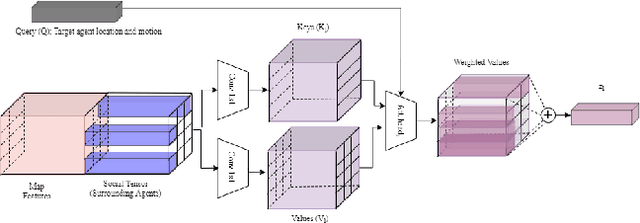
Predicting the trajectories of surrounding agents is an essential ability for robots navigating complex real-world environments. Autonomous vehicles (AV) in particular, can generate safe and efficient path plans by predicting the motion of surrounding road users. Future trajectories of agents can be inferred using two tightly linked cues: the locations and past motion of agents, and the static scene structure. The configuration of the agents may uncover which part of the scene is more relevant, while the scene structure can determine the relative influence of agents on each other's motion. To better model the interdependence of the two cues, we propose a multi-head attention-based model that uses a joint representation of the static scene and agent configuration for generating both keys and values for the attention heads. Moreover, to address the multimodality of future agent motion, we propose to use each attention head to generate a distinct future trajectory of the agent. Our model achieves state of the art results on the publicly available nuScenes dataset and generates diverse future trajectories compliant with scene structure and agent configuration. Additionally, the visualization of attention maps adds a layer of interpretability to the trajectories predicted by the model.