 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProbabilistic End-to-End Vehicle Navigation in Complex Dynamic Environments with Multimodal Sensor Fusion
Paper and Code
May 05, 2020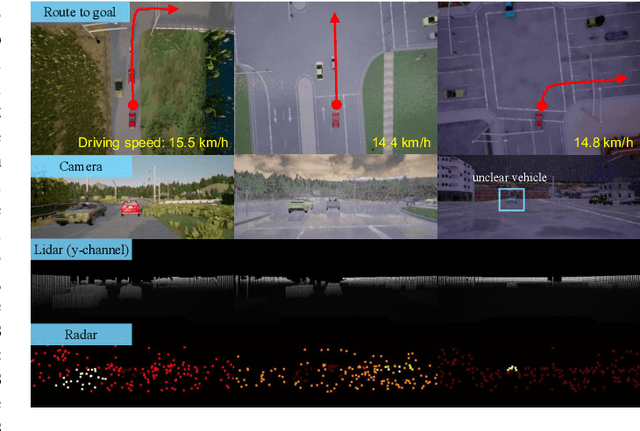
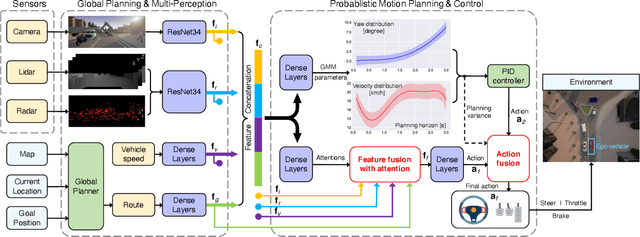
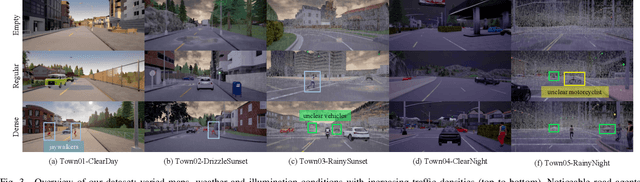
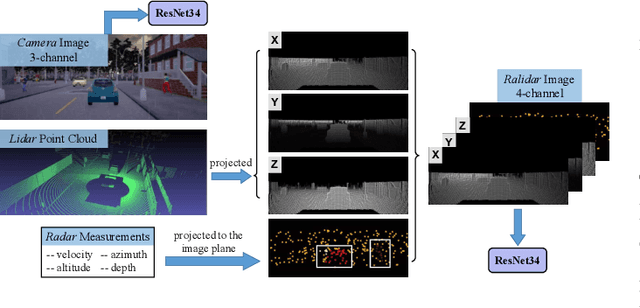
All-day and all-weather navigation is a critical capability for autonomous driving, which requires proper reaction to varied environmental conditions and complex agent behaviors. Recently, with the rise of deep learning, end-to-end control for autonomous vehicles has been well studied. However, most works are solely based on visual information, which can be degraded by challenging illumination conditions such as dim light or total darkness. In addition, they usually generate and apply deterministic control commands without considering the uncertainties in the future. In this paper, based on imitation learning, we propose a probabilistic driving model with ultiperception capability utilizing the information from the camera, lidar and radar. We further evaluate its driving performance online on our new driving benchmark, which includes various environmental conditions (e.g., urban and rural areas, traffic densities, weather and times of the day) and dynamic obstacles (e.g., vehicles, pedestrians, motorcyclists and bicyclists). The results suggest that our proposed model outperforms baselines and achieves excellent generalization performance in unseen environments with heavy traffic and extreme weather.