 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Place Objects onto Flat Surfaces in Human-Preferred Orientations
Paper and Code
Apr 01, 2020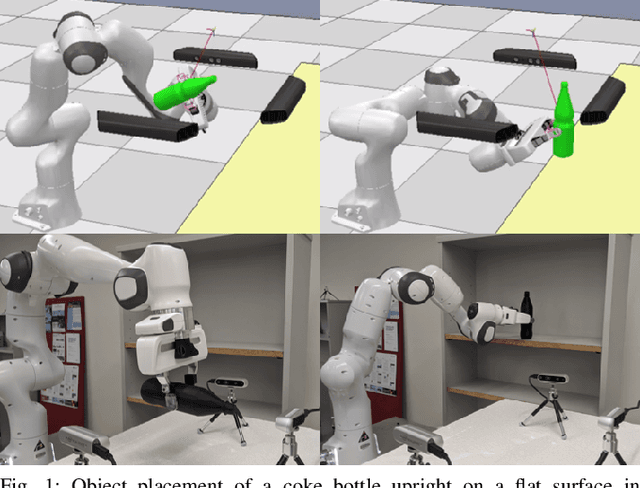
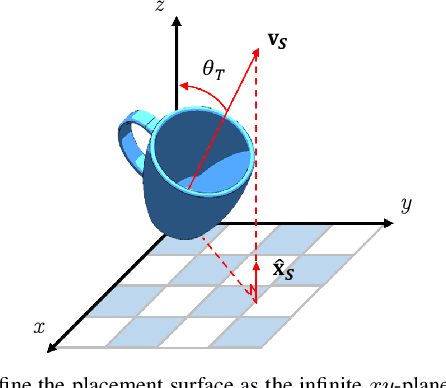
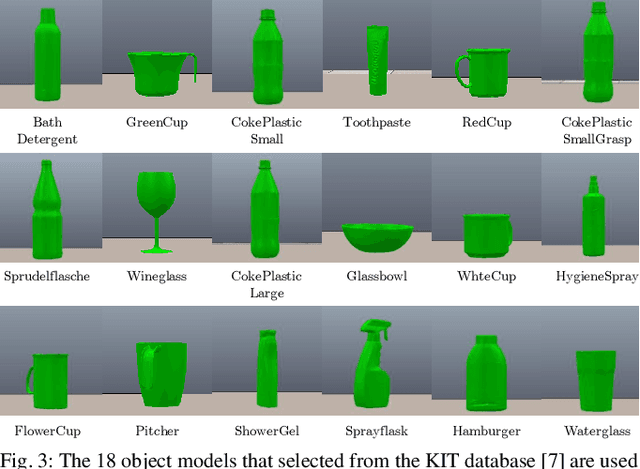
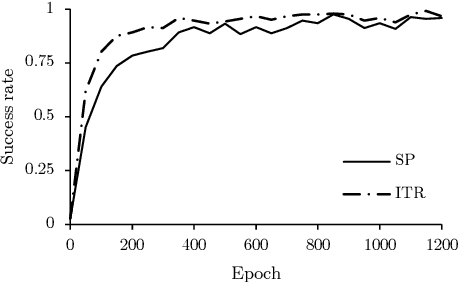
We study the problem of placing a grasped object on an empty flat surface in a human-preferred orientation, such as placing a cup on its bottom rather than on its side. We aim to find the required object rotation such that when the gripper is opened after the object makes a contact with the surface, the object would be stably placed in the desired orientation. We use two neural networks in an iterative fashion. At every iteration, Placement Rotation CNN (PR-CNN) estimates the required object rotation which is executed by the robot, and then Placement Stability CNN (PS-CNN) estimates if the object would be stable if it is placed in its current orientation. In simulation experiments, our approach places objects in human-preferred orientations with a success rate of 86.1% using a dataset of 18 everyday objects. A real-world implementation is presented, which serves as a proof-of-concept for direct sim-to-real transfer. We observe that sometimes it is impossible to place a grasped object in a desired orientation without re-grasping, which motivates future research for grasping with intention to place objects.