 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Workload Adaptive Haptic Shared Control Scheme for Semi-Autonomous Driving
Paper and Code
Mar 31, 2020
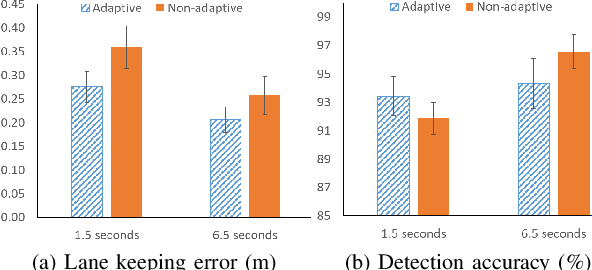
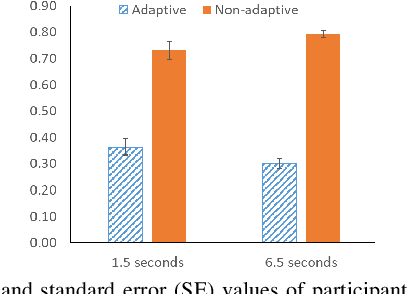

Haptic shared control is used to manage the control authority allocation between a human and an autonomous agent in semi-autonomous driving. Existing haptic shared control schemes, however, do not take full consideration of the human agent. To fill this research gap, this study presents a haptic shared control scheme that adapts to a human operator's workload, eyes on road and input torque in real-time. We conducted human-in-the-loop experiments with 24 participants. In the experiment, a human operator and an autonomy module for navigation shared the control of a simulated notional High Mobility Multipurpose Wheeled Vehicle (HMMWV) at a fixed speed. At the same time, the human operator performed a target detection task for surveillance. The autonomy could be either adaptive or non-adaptive to the above-mentioned human factors. Results indicate that the adaptive haptic control scheme resulted in significantly lower workload, higher trust in autonomy, better driving task performance and smaller control effort.