 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistribution-Free Risk-Aware Planning and Control Under Uncertainty Using Conformal Spectral Risk Control
Jun 02, 2026Safe navigation in dynamic and uncertain environments often relies on accurate estimation of, or assumptions about, the true underlying uncertainty. However, accurately characterizing the true uncertainty distribution is often difficult due to limited data or imperfect information. An incorrect understanding of the uncertainty and its associated risk may lead to dangerous decisions even under high levels of risk aversion. To address this issue, we propose a risk-aware model predictive control (RA-MPC) framework that incorporates prediction sets to guarantee risk control below a user-specified threshold without requiring assumptions about the underlying uncertainty distribution. To generate the prediction sets, we develop a distribution-free risk quantification framework that extends conformal risk control (CRC) to general spectral risk measures. We then show that incorporating the prediction sets into the MPC framework provides statistical safety guarantees in terms of spectral risk constraint satisfaction even under uncertainty misspecification. We validate the proposed framework in simulated vehicle obstacle avoidance scenarios, demonstrating improved safety and reduced solve time compared to a baseline RA-MPC framework.
High-Speed, All-Terrain Autonomy: Ensuring Safety at the Limits of Mobility
Mar 20, 2026A novel local trajectory planner, capable of controlling an autonomous off-road vehicle on rugged terrain at high-speed is presented. Autonomous vehicles are currently unable to safely operate off-road at high-speed, as current approaches either fail to predict and mitigate rollovers induced by rough terrain or are not real-time feasible. To address this challenge, a novel model predictive control (MPC) formulation is developed for local trajectory planning. A new dynamics model for off-road vehicles on rough, non-planar terrain is derived and used for prediction. Extreme mobility, including tire liftoff without rollover, is safely enabled through a new energy-based constraint. The formulation is analytically shown to mitigate rollover types ignored by many state-of-the-art methods, and real-time feasibility is achieved through parallelized GPGPU computation. The planner's ability to provide safe, extreme trajectories is studied through both simulated trials and full-scale physical experiments. The results demonstrate fewer rollovers and more successes compared to a state-of-the-art baseline across several challenging scenarios that push the vehicle to its mobility limits.
A Workload Adaptive Haptic Shared Control Scheme for Semi-Autonomous Driving
Mar 31, 2020
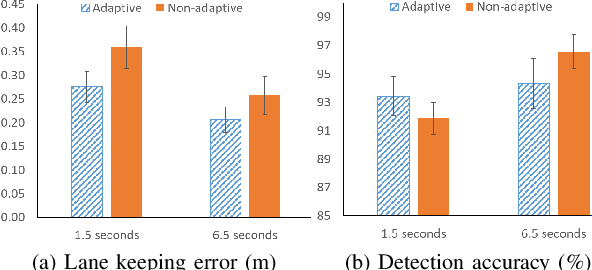
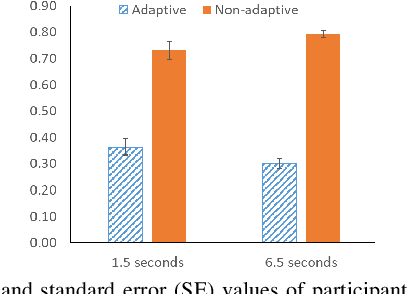

Haptic shared control is used to manage the control authority allocation between a human and an autonomous agent in semi-autonomous driving. Existing haptic shared control schemes, however, do not take full consideration of the human agent. To fill this research gap, this study presents a haptic shared control scheme that adapts to a human operator's workload, eyes on road and input torque in real-time. We conducted human-in-the-loop experiments with 24 participants. In the experiment, a human operator and an autonomy module for navigation shared the control of a simulated notional High Mobility Multipurpose Wheeled Vehicle (HMMWV) at a fixed speed. At the same time, the human operator performed a target detection task for surveillance. The autonomy could be either adaptive or non-adaptive to the above-mentioned human factors. Results indicate that the adaptive haptic control scheme resulted in significantly lower workload, higher trust in autonomy, better driving task performance and smaller control effort.