 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInferring the Material Properties of Granular Media for Robotic Tasks
Paper and Code
Mar 19, 2020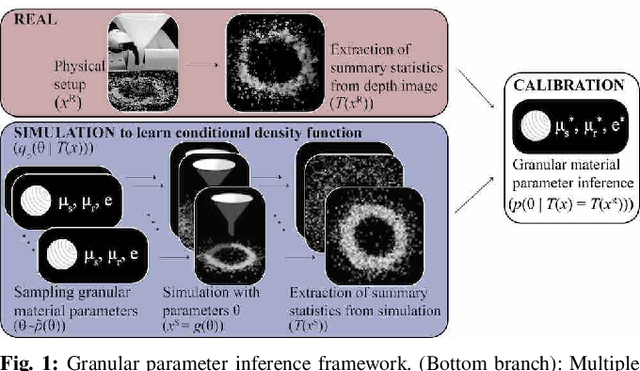
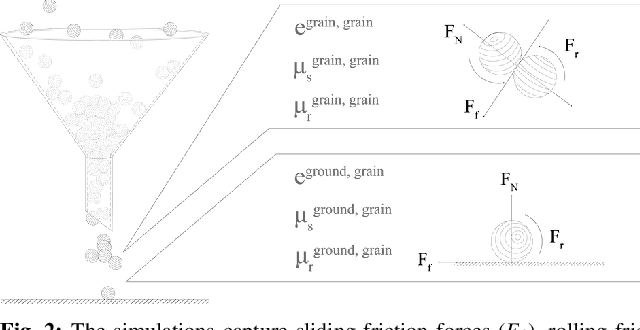
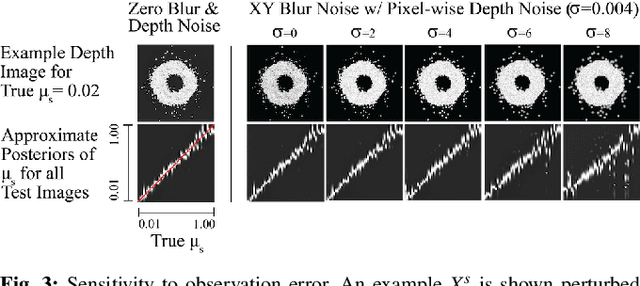
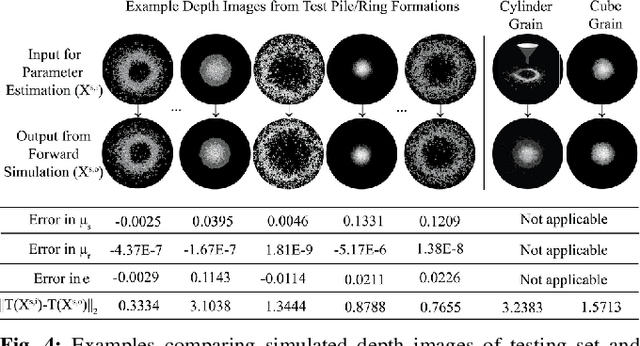
Granular media (e.g., cereal grains, plastic resin pellets, and pills) are ubiquitous in robotics-integrated industries, such as agriculture, manufacturing, and pharmaceutical development. This prevalence mandates the accurate and efficient simulation of these materials. This work presents a software and hardware framework that automatically calibrates a fast physics simulator to accurately simulate granular materials by inferring material properties from real-world depth images of granular formations (i.e., piles and rings). Specifically, coefficients of sliding friction, rolling friction, and restitution of grains are estimated from summary statistics of grain formations using likelihood-free Bayesian inference. The calibrated simulator accurately predicts unseen granular formations in both simulation and experiment; furthermore, simulator predictions are shown to generalize to more complex tasks, including using a robot to pour grains into a bowl, as well as to create a desired pattern of piles and rings. Visualizations of the framework and experiments can be viewed at https://www.youtube.com/watch?v=X-5Sk2TUET4.