 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSparse Graphical Memory for Robust Planning
Paper and Code
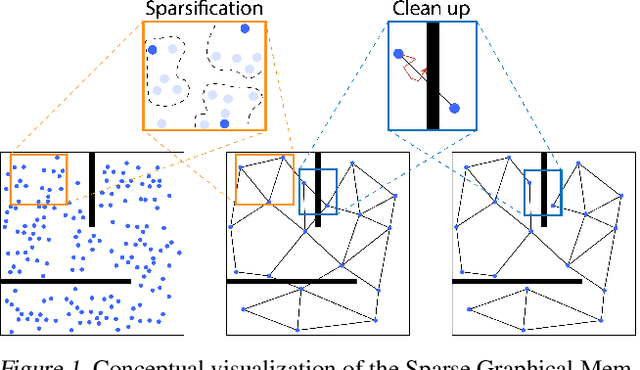
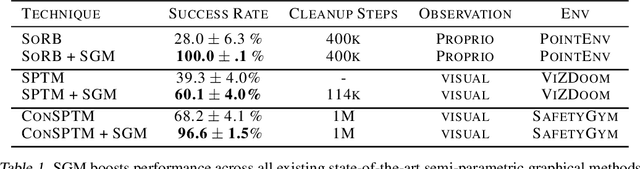
To operate effectively in the real world, artificial agents must act from raw sensory input such as images and achieve diverse goals across long time-horizons. On the one hand, recent strides in deep reinforcement and imitation learning have demonstrated impressive ability to learn goal-conditioned policies from high-dimensional image input, though only for short-horizon tasks. On the other hand, classical graphical methods like A* search are able to solve long-horizon tasks, but assume that the graph structure is abstracted away from raw sensory input and can only be constructed with task-specific priors. We wish to combine the strengths of deep learning and classical planning to solve long-horizon tasks from raw sensory input. To this end, we introduce Sparse Graphical Memory (SGM), a new data structure that stores observations and feasible transitions in a sparse memory. SGM can be combined with goal-conditioned RL or imitative agents to solve long-horizon tasks across a diverse set of domains. We show that SGM significantly outperforms current state of the art methods on long-horizon, sparse-reward visual navigation tasks. Project video and code are available at https://mishalaskin.github.io/sgm/