 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAirSim Drone Racing Lab
Paper and Code

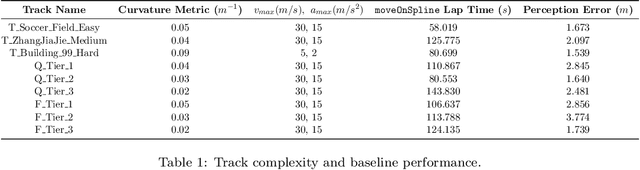

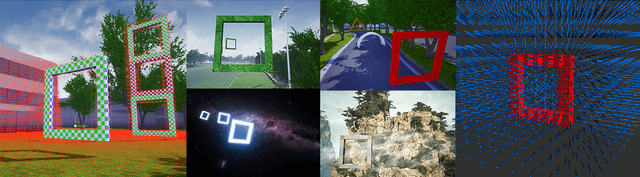
Autonomous drone racing is a challenging research problem at the intersection of computer vision, planning, state estimation, and control. We introduce AirSim Drone Racing Lab, a simulation framework for enabling fast prototyping of algorithms for autonomy and enabling machine learning research in this domain, with the goal of reducing the time, money, and risks associated with field robotics. Our framework enables generation of racing tracks in multiple photo-realistic environments, orchestration of drone races, comes with a suite of gate assets, allows for multiple sensor modalities (monocular, depth, neuromorphic events, optical flow), different camera models, and benchmarking of planning, control, computer vision, and learning-based algorithms. We used our framework to host a simulation based drone racing competition at NeurIPS 2019. The competition binaries are available at our github repository.