 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeApplying Depth-Sensing to Automated Surgical Manipulation with a da Vinci Robot
Paper and Code
Feb 15, 2020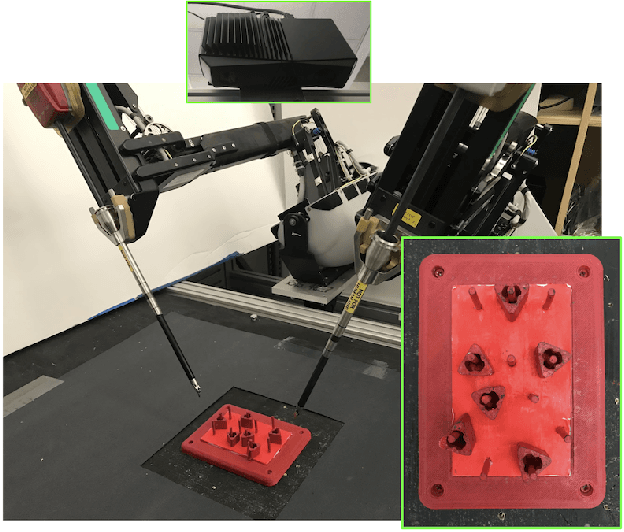
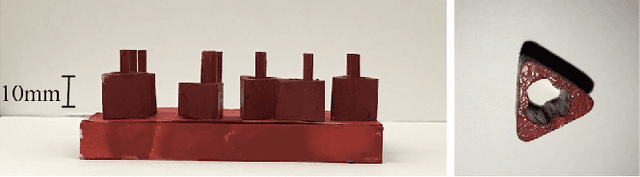
Recent advances in depth-sensing have significantly increased accuracy, resolution, and frame rate, as shown in the 1920x1200 resolution and 13 frames per second Zivid RGBD camera. In this study, we explore the potential of depth sensing for efficient and reliable automation of surgical subtasks. We consider a monochrome (all red) version of the peg transfer task from the Fundamentals of Laparoscopic Surgery training suite implemented with the da Vinci Research Kit (dVRK). We use calibration techniques that allow the imprecise, cable-driven da Vinci to reduce error from 4-5 mm to 1-2 mm in the task space. We report experimental results for a handover-free version of the peg transfer task, performing 20 and 5 physical episodes with single- and bilateral-arm setups, respectively. Results over 236 and 49 total block transfer attempts for the single- and bilateral-arm peg transfer cases suggest that reliability can be attained with 86.9 % and 78.0 % for each individual block, with respective block transfer speeds of 10.02 and 5.72 seconds. Supplementary material is available at https://sites.google.com/view/peg-transfer.