 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCellular Decomposition for Non-repetitive Coverage Task with Minimum Discontinuities
Paper and Code
Jan 27, 2020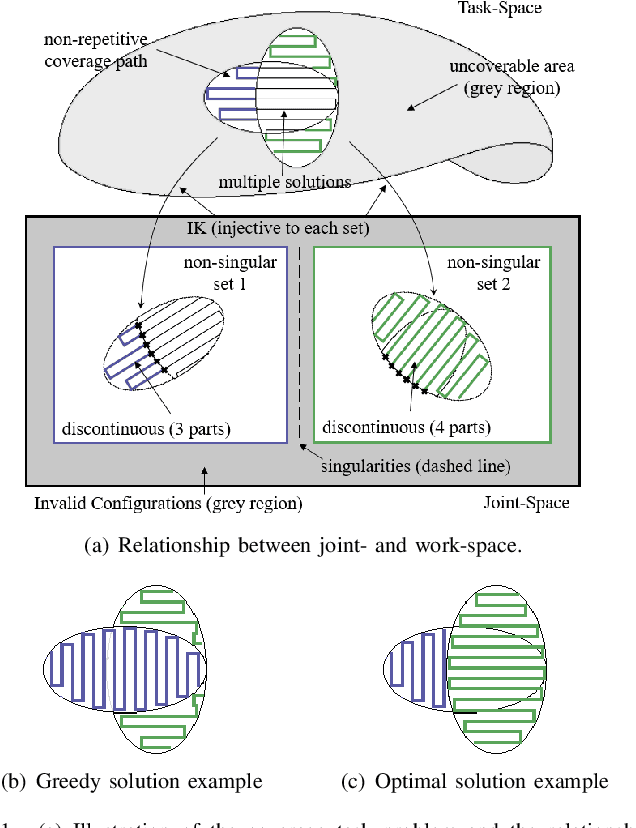
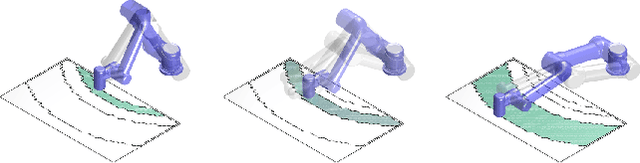
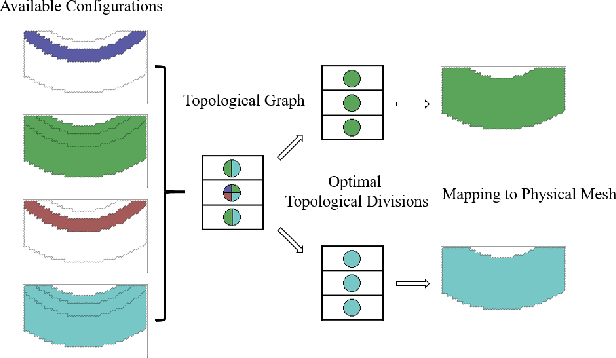
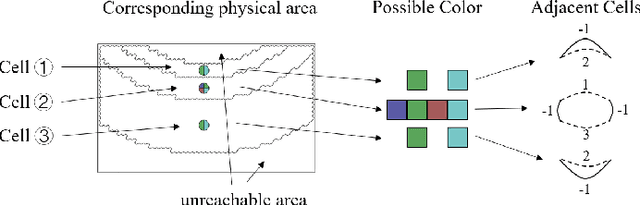
A mechanism to derive non-repetitive coverage path solutions with a proven minimal number of discontinuities is proposed in this work, with the aim to avoid unnecessary, costly end effector lift-offs for manipulators. The problem is motivated by the automatic polishing of an object. Due to the non-bijective mapping between the workspace and the joint-space, a continuous coverage path in the workspace may easily be truncated in the joint-space, incuring undesirable end effector lift-offs. Inversely, there may be multiple configuration choices to cover the same point of a coverage path through the solution of the Inverse Kinematics. The solution departs from the conventional local optimisation of the coverage path shape in task space, or choosing appropriate but possibly disconnected configurations, to instead explicitly explore the leaast number of discontinuous motions through the analysis of the structure of valid configurations in joint-space. The two novel contributions of this paper include proof that the least number of path discontinuities is predicated on the surrounding environment, independent from the choice of the actual coverage path; thus has a minimum. And an efficient finite cellular decomposition method to optimally divide the workspace into the minimum number of cells, each traversable without discontinuties by any arbitrary coverage path within. Extensive simulation examples and real-world results on a 5 DoF manipulator are presented to prove the validity of the proposed strategy in realistic settings.