 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePose-Assisted Multi-Camera Collaboration for Active Object Tracking
Paper and Code
Jan 15, 2020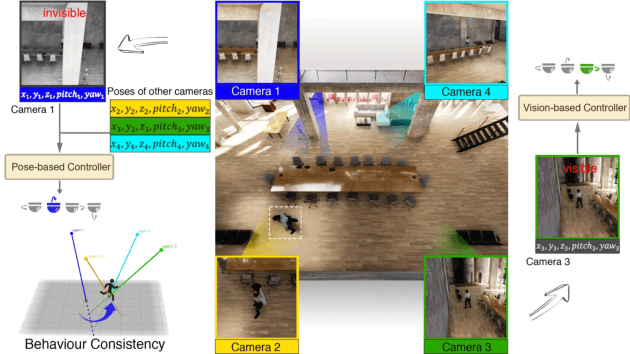
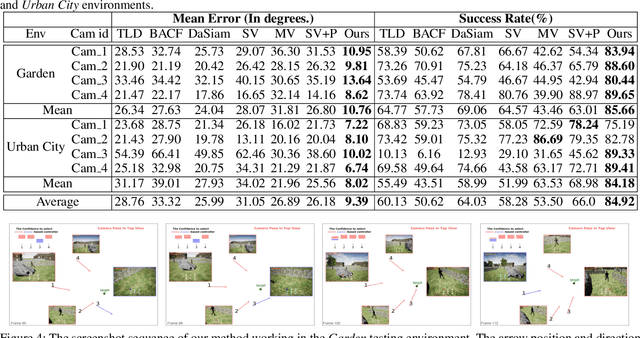
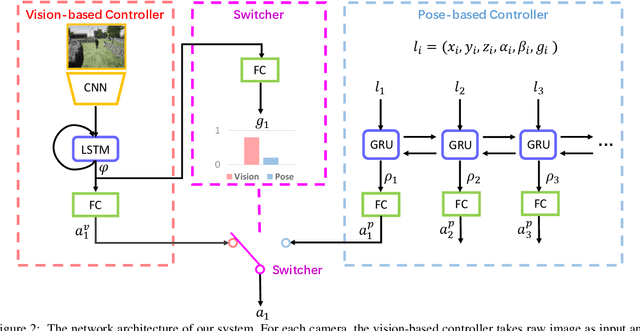
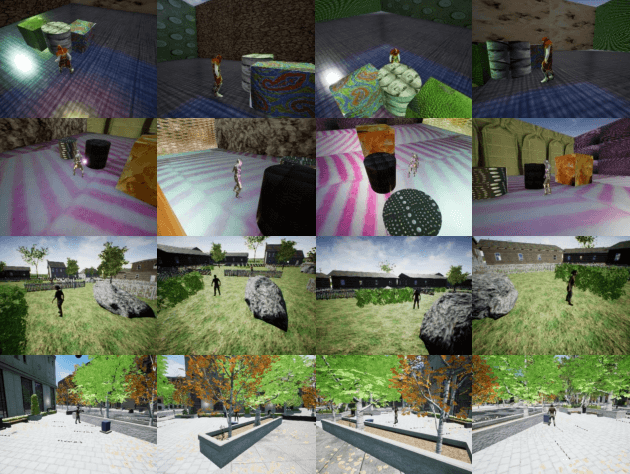
Active Object Tracking (AOT) is crucial to many visionbased applications, e.g., mobile robot, intelligent surveillance. However, there are a number of challenges when deploying active tracking in complex scenarios, e.g., target is frequently occluded by obstacles. In this paper, we extend the single-camera AOT to a multi-camera setting, where cameras tracking a target in a collaborative fashion. To achieve effective collaboration among cameras, we propose a novel Pose-Assisted Multi-Camera Collaboration System, which enables a camera to cooperate with the others by sharing camera poses for active object tracking. In the system, each camera is equipped with two controllers and a switcher: The vision-based controller tracks targets based on observed images. The pose-based controller moves the camera in accordance to the poses of the other cameras. At each step, the switcher decides which action to take from the two controllers according to the visibility of the target. The experimental results demonstrate that our system outperforms all the baselines and is capable of generalizing to unseen environments. The code and demo videos are available on our website https://sites.google.com/view/pose-assistedcollaboration.