 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual Semantic SLAM with Landmarks for Large-Scale Outdoor Environment
Paper and Code
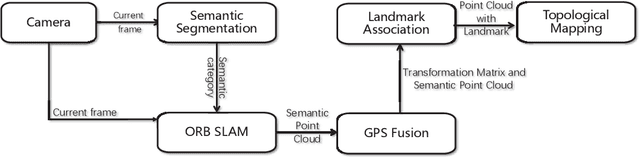
Semantic SLAM is an important field in autonomous driving and intelligent agents, which can enable robots to achieve high-level navigation tasks, obtain simple cognition or reasoning ability and achieve language-based human-robot-interaction. In this paper, we built a system to creat a semantic 3D map by combining 3D point cloud from ORB SLAM with semantic segmentation information from Convolutional Neural Network model PSPNet-101 for large-scale environments. Besides, a new dataset for KITTI sequences has been built, which contains the GPS information and labels of landmarks from Google Map in related streets of the sequences. Moreover, we find a way to associate the real-world landmark with point cloud map and built a topological map based on semantic map.