Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnalysis of minima for geodesic and chordal cost for a minimal 2D pose-graph SLAM problem
Paper and Code
Nov 20, 2019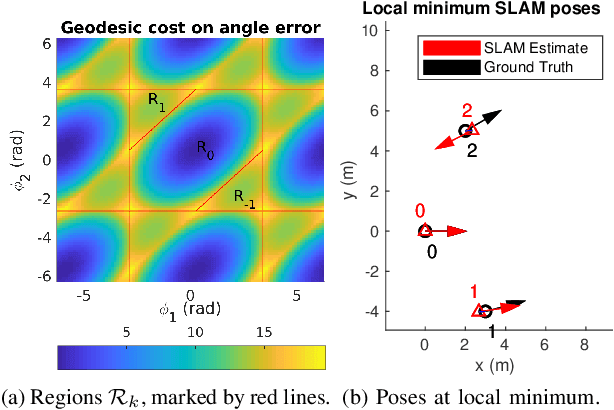
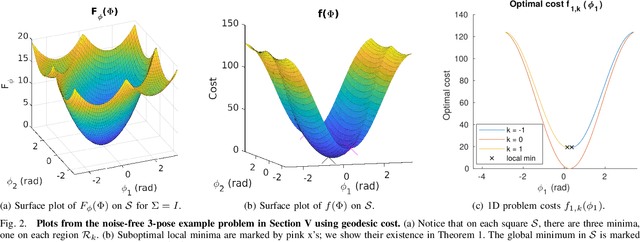
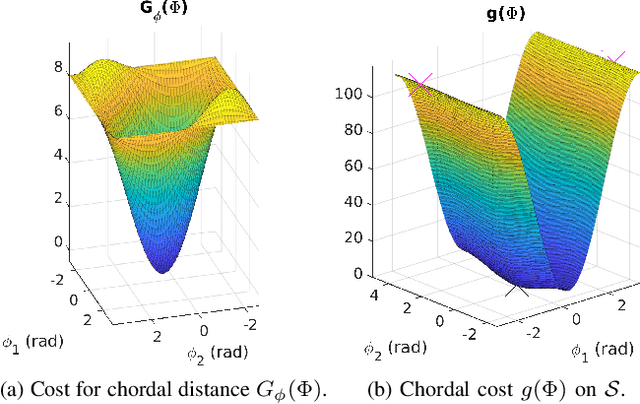
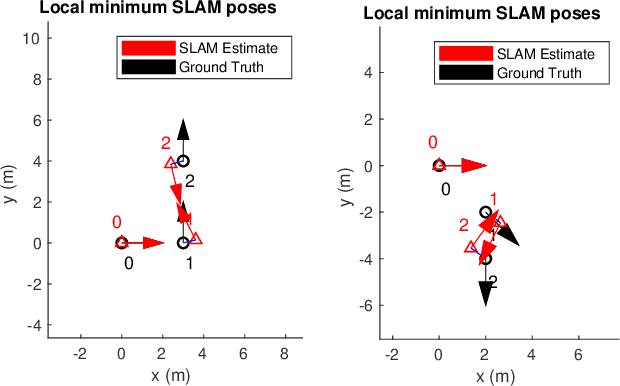
In this paper, we show that for a minimal pose-graph problem, even in the ideal case of perfect measurements and spherical covariance, using the so-called "wrap function" when comparing angles results in multiple suboptimal local minima. We numerically estimate regions of attraction to these local minima for some numerical examples, and give evidence to show that they are of nonzero measure. In contrast, under the same assumptions, we show that the \textit{chordal distance} representation of angle error has a unique minimum up to periodicity. For chordal cost, we also search for initial conditions that fail to converge to the global minimum, and find that this occurs with far fewer points than with geodesic cost.
* Accepted for publication in Robotics and Automation Letters. This
version contains extended proofs, which do not fit in the RA-L page limit
View paper on