 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCSPN++: Learning Context and Resource Aware Convolutional Spatial Propagation Networks for Depth Completion
Paper and Code
Nov 22, 2019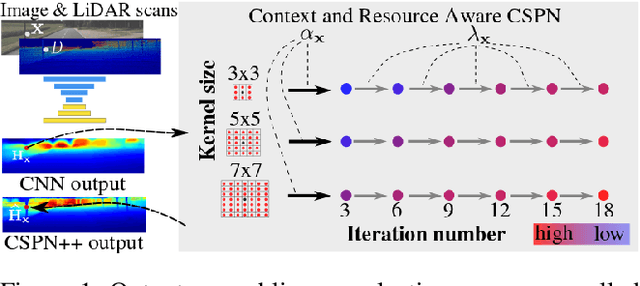

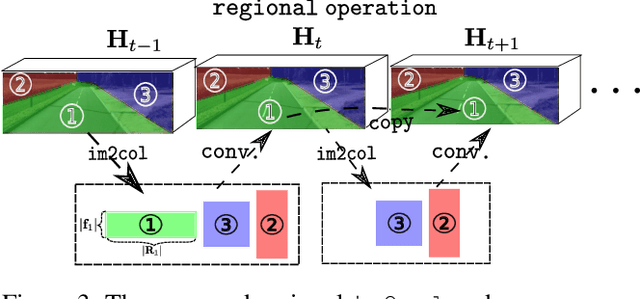
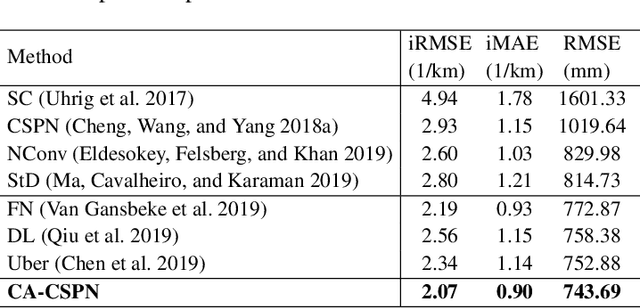
Depth Completion deals with the problem of converting a sparse depth map to a dense one, given the corresponding color image. Convolutional spatial propagation network (CSPN) is one of the state-of-the-art (SoTA) methods of depth completion, which recovers structural details of the scene. In this paper, we propose CSPN++, which further improves its effectiveness and efficiency by learning adaptive convolutional kernel sizes and the number of iterations for the propagation, thus the context and computational resources needed at each pixel could be dynamically assigned upon requests. Specifically, we formulate the learning of the two hyper-parameters as an architecture selection problem where various configurations of kernel sizes and numbers of iterations are first defined, and then a set of soft weighting parameters are trained to either properly assemble or select from the pre-defined configurations at each pixel. In our experiments, we find weighted assembling can lead to significant accuracy improvements, which we referred to as "context-aware CSPN", while weighted selection, "resource-aware CSPN" can reduce the computational resource significantly with similar or better accuracy. Besides, the resource needed for CSPN++ can be adjusted w.r.t. the computational budget automatically. Finally, to avoid the side effects of noise or inaccurate sparse depths, we embed a gated network inside CSPN++, which further improves the performance. We demonstrate the effectiveness of CSPN++on the KITTI depth completion benchmark, where it significantly improves over CSPN and other SoTA methods.