 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Manipulate Deformable Objects without Demonstrations
Paper and Code
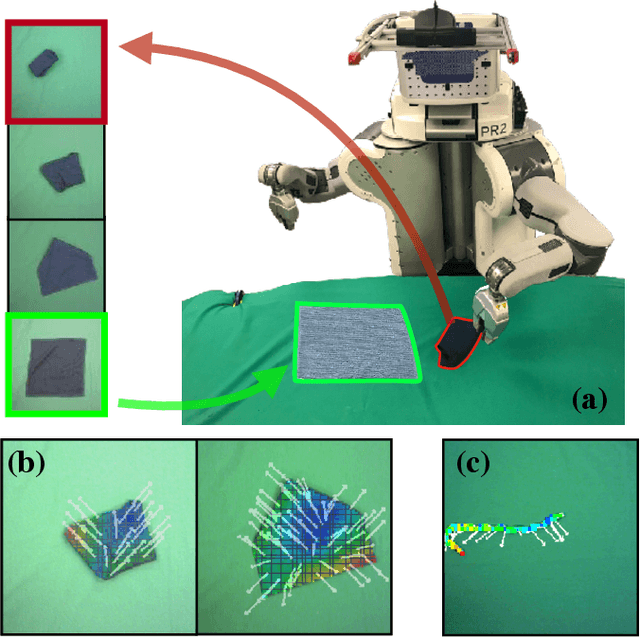
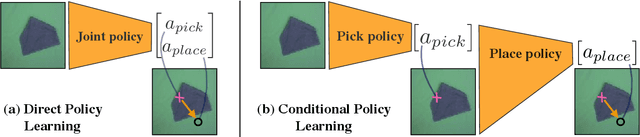
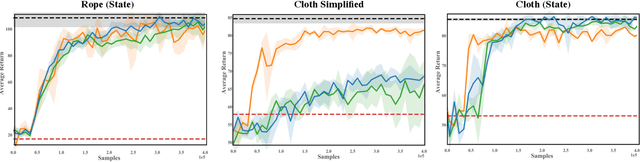
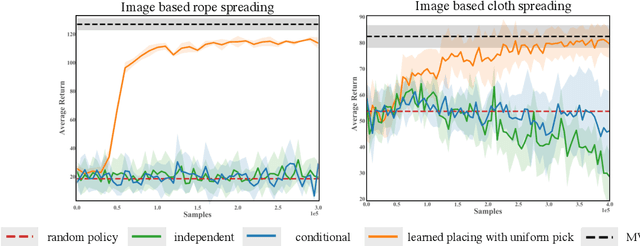
In this paper we tackle the problem of deformable object manipulation through model-free visual reinforcement learning (RL). In order to circumvent the sample inefficiency of RL, we propose two key ideas that accelerate learning. First, we propose an iterative pick-place action space that encodes the conditional relationship between picking and placing on deformable objects. The explicit structural encoding enables faster learning under complex object dynamics. Second, instead of jointly learning both the pick and the place locations, we only explicitly learn the placing policy conditioned on random pick points. Then, by selecting the pick point that has Maximal Value under Placing (MVP), we obtain our picking policy. Using this learning framework, we obtain an order of magnitude faster learning compared to independent action-spaces on our suite of deformable object manipulation tasks. Finally, using domain randomization, we transfer our policies to a real PR2 robot for challenging cloth and rope manipulation.