 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Sample Efficiency in Model-Free Reinforcement Learning from Images
Paper and Code

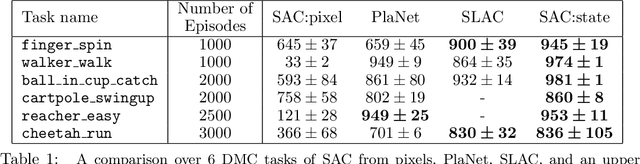
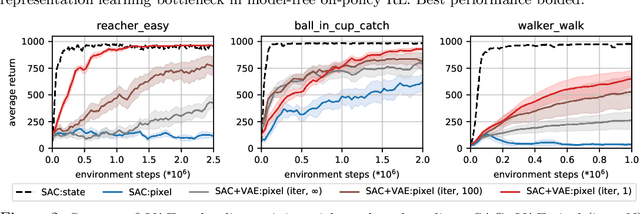
Training an agent to solve control tasks directly from high-dimensional images with model-free reinforcement learning (RL) has proven difficult. The agent needs to learn a latent representation together with a control policy to perform the task. Fitting a high-capacity encoder using a scarce reward signal is not only sample inefficient, but also prone to suboptimal convergence. Two ways to improve sample efficiency are to extract relevant features for the task and use off-policy algorithms. We dissect various approaches of learning good latent features, and conclude that the image reconstruction loss is the essential ingredient that enables efficient and stable representation learning in image-based RL. Following these findings, we devise an off-policy actor-critic algorithm with an auxiliary decoder that trains end-to-end and matches state-of-the-art performance across both model-free and model-based algorithms on many challenging control tasks. We release our code to encourage future research on image-based RL.