 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEPOSIT: An Absolute Pose Estimation Method for Pinhole and Fish-Eye Cameras
Paper and Code
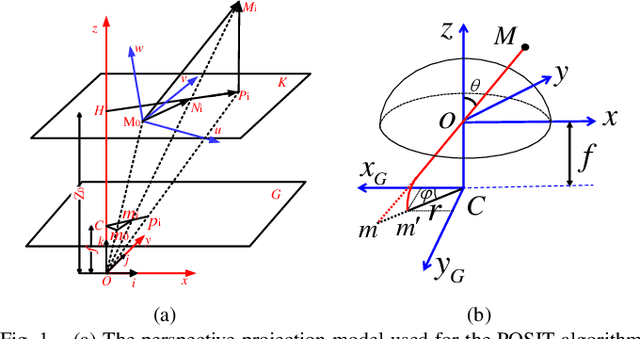
This paper presents a generic 6DOF camera pose estimation method, which can be used for both the pinhole camera and the fish-eye camera. Different from existing methods, relative positions of 3D points rather than absolute coordinates in the world coordinate system are employed in our method, and it has a unique solution. The application scope of POSIT (Pose from Orthography and Scaling with Iteration) algorithm is generalized to fish-eye cameras by combining with the radially symmetric projection model. The image point relationship between the pinhole camera and the fish-eye camera is derived based on their projection model. The general pose expression which fits for different cameras can be acquired by four noncoplanar object points and their corresponding image points. Accurate estimation results are calculated iteratively. Experimental results on synthetic and real data show that the pose estimation results of our method are more stable and accurate than state-of-the-art methods. The source code is available at https://github.com/k032131/EPOSIT.