 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMeta Reinforcement Learning for Sim-to-real Domain Adaptation
Paper and Code
Sep 16, 2019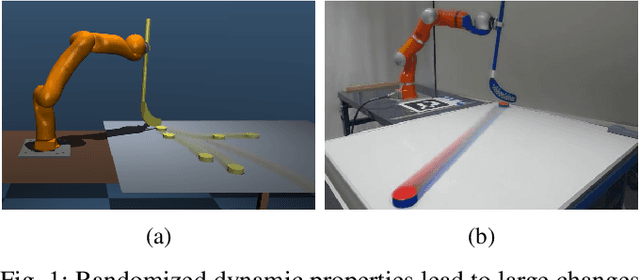
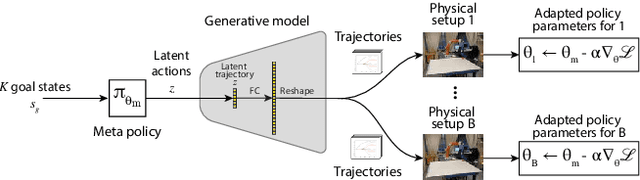
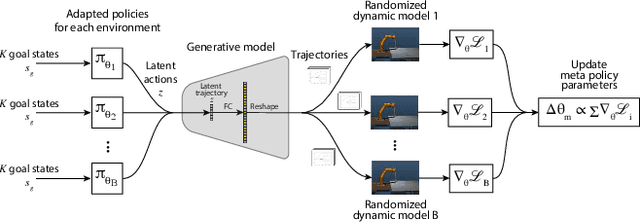
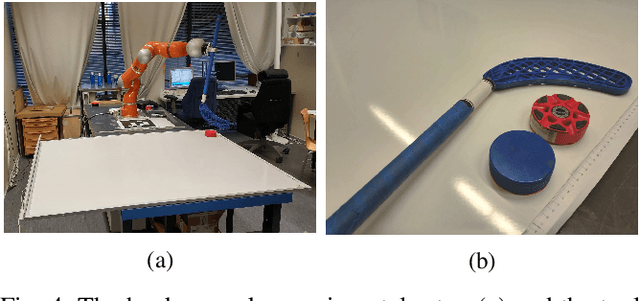
Modern reinforcement learning methods suffer from low sample efficiency and unsafe exploration, making it infeasible to train robotic policies entirely on real hardware. In this work, we propose to address the problem of sim-to-real domain transfer by using meta learning to train a policy that can adapt to a variety of dynamic conditions, and using a task-specific trajectory generation model to provide an action space that facilitates quick exploration. We evaluate the method by performing domain adaptation in simulation and analyzing the structure of the latent space during adaptation. We then deploy this policy on a KUKA LBR 4+ robot and evaluate its performance on a task of hitting a hockey puck to a target. Our method shows more consistent and stable domain adaptation than the baseline, resulting in better overall performance.