 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Generalizable Locomotion Skills with Hierarchical Reinforcement Learning
Paper and Code
Sep 26, 2019
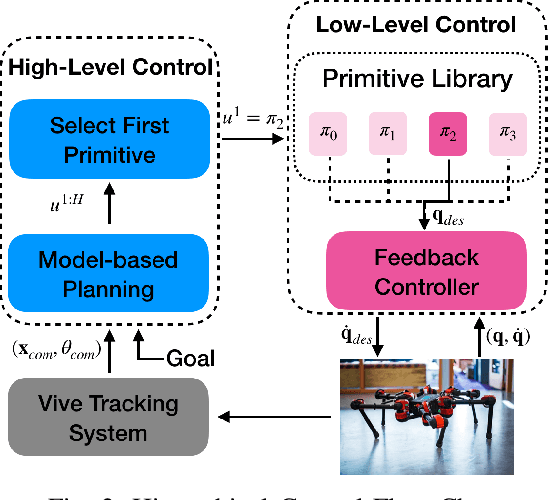
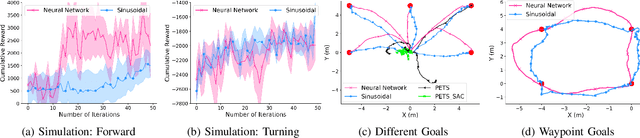
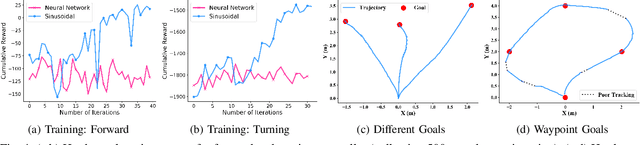
Learning to locomote to arbitrary goals on hardware remains a challenging problem for reinforcement learning. In this paper, we present a hierarchical learning framework that improves sample-efficiency and generalizability of locomotion skills on real-world robots. Our approach divides the problem of goal-oriented locomotion into two sub-problems: learning diverse primitives skills, and using model-based planning to sequence these skills. We parametrize our primitives as cyclic movements, improving sample-efficiency of learning on a 18 degrees of freedom robot. Then, we learn coarse dynamics models over primitive cycles and use them in a model predictive control framework. This allows us to learn to walk to arbitrary goals up to 12m away, after about two hours of training from scratch on hardware. Our results on a Daisy hexapod hardware and simulation demonstrate the efficacy of our approach at reaching distant targets, in different environments and with sensory noise.