 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMAT: Multi-Fingered Adaptive Tactile Grasping via Deep Reinforcement Learning
Paper and Code
Oct 10, 2019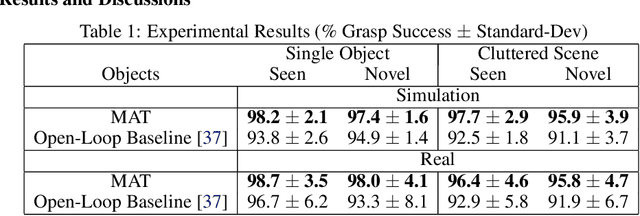
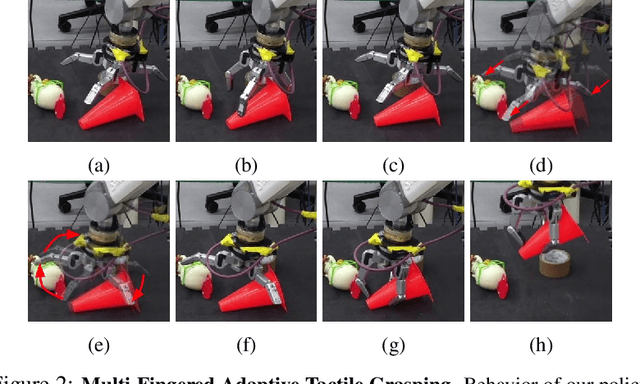
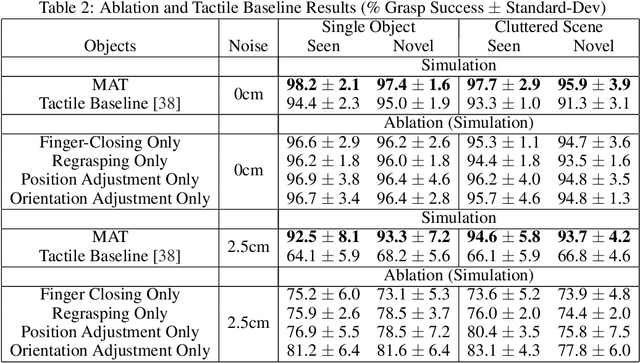
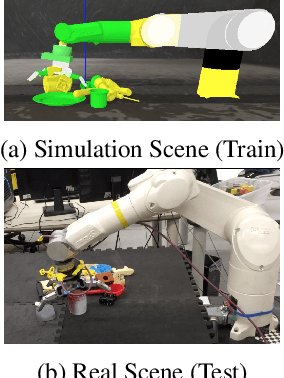
Vision-based grasping systems typically adopt an open-loop execution of a planned grasp. This policy can fail due to many reasons, including ubiquitous calibration error. Recovery from a failed grasp is further complicated by visual occlusion, as the hand is usually occluding the vision sensor as it attempts another open-loop regrasp. This work presents MAT, a tactile closed-loop method capable of realizing grasps provided by a coarse initial positioning of the hand above an object. Our algorithm is a deep reinforcement learning (RL) policy optimized through the clipped surrogate objective within a maximum entropy RL framework to balance exploitation and exploration. The method utilizes tactile and proprioceptive information to act through both fine finger motions and larger regrasp movements to execute stable grasps. A novel curriculum of action motion magnitude makes learning more tractable and helps turn common failure cases into successes. Careful selection of features that exhibit small sim-to-real gaps enables this tactile grasping policy, trained purely in simulation, to transfer well to real world environments without the need for additional learning. Experimentally, this methodology improves over a vision-only grasp success rate substantially on a multi-fingered robot hand. When this methodology is used to realize grasps from coarse initial positions provided by a vision-only planner, the system is made dramatically more robust to calibration errors in the camera-robot transform.