 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Iterative Linear-Quadratic Approximations for Nonlinear Multi-Player General-Sum Differential Games
Paper and Code
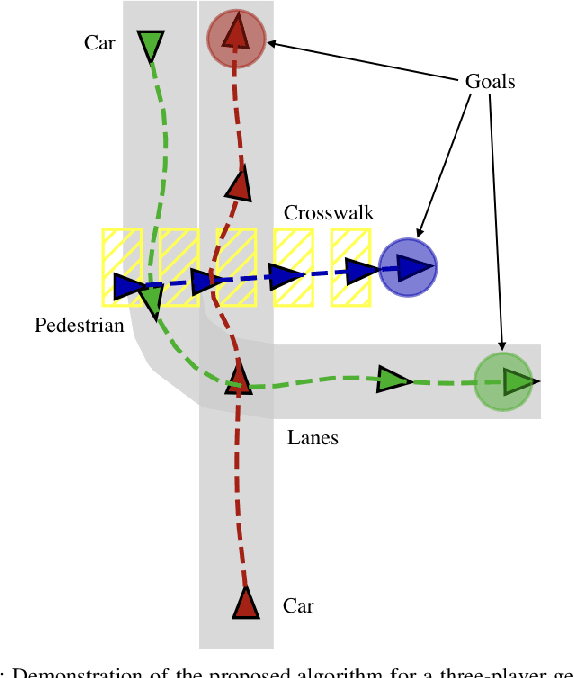
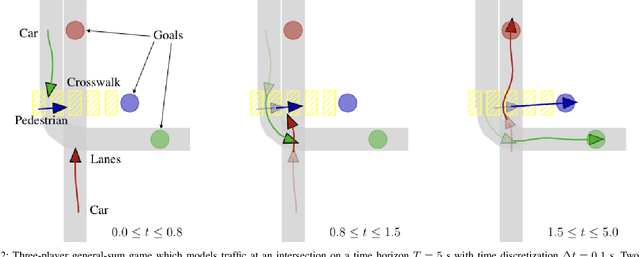
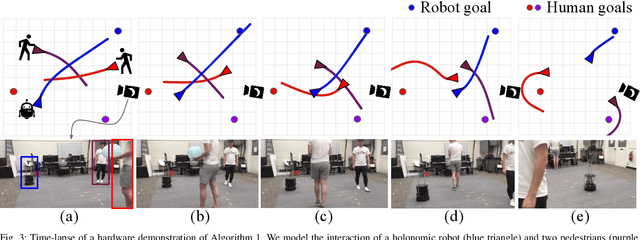
Differential games offer a powerful theoretical framework for formulating safety and robustness problems in optimal control. Unfortunately, numerical solution techniques for general nonlinear dynamical systems scale poorly with state dimension and are rarely used in applications requiring real-time computation. For single-agent optimal control problems, however, local methods based on efficiently solving iterated approximations with linear dynamics and quadratic costs are becoming increasingly popular. We take inspiration from one such method, the iterative linear quadratic regulator (ILQR), and observe that efficient algorithms also exist to solve multi-player linear-quadratic games. Whereas ILQR converges to a local solution of the optimal control problem, if our method converges it returns a local Nash equilibrium of the differential game. We benchmark our method in a three-player general-sum simulated example, in which it takes < 0.75 s to identify a solution and < 50 ms to solve warm-started subproblems in a receding horizon. We also demonstrate our approach in hardware, operating in real-time and following a 10 s receding horizon.