Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCooperative Lane Changing via Deep Reinforcement Learning
Paper and Code
Jun 20, 2019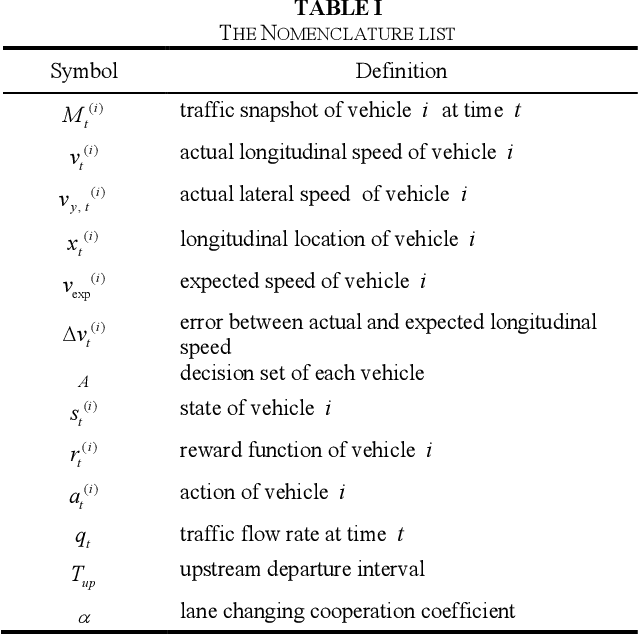
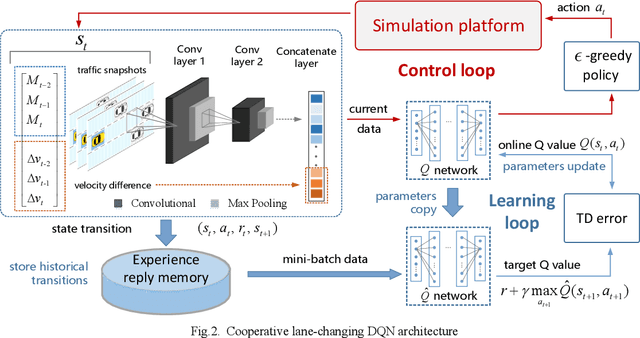
In this paper, we study how to learn an appropriate lane changing strategy for autonomous vehicles by using deep reinforcement learning. We show that the reward of the system should consider the overall traffic efficiency instead of the travel efficiency of an individual vehicle. In summary, cooperation leads to a more harmonic and efficient traffic system rather than competition
* 7 pages, 6 figures
View paper on