 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePRECOG: PREdiction Conditioned On Goals in Visual Multi-Agent Settings
Paper and Code
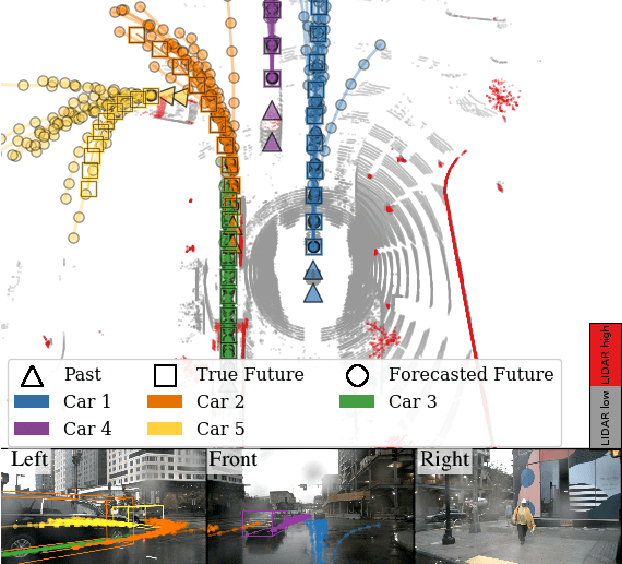
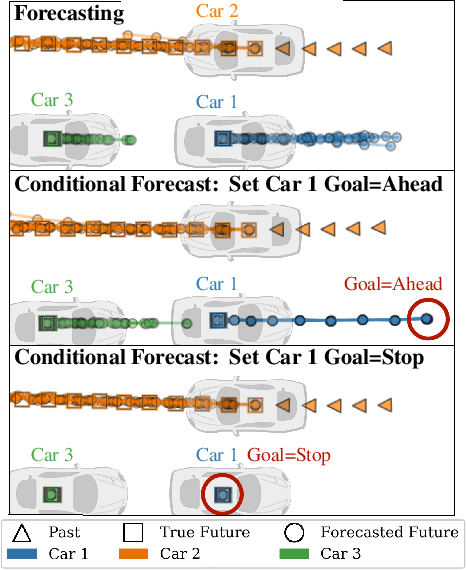
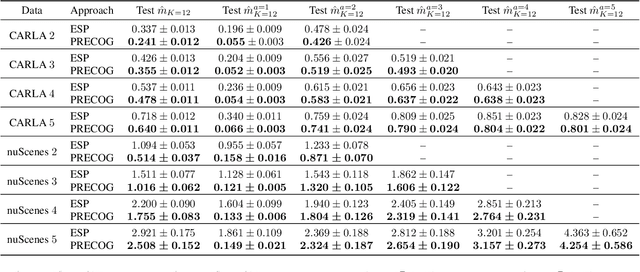
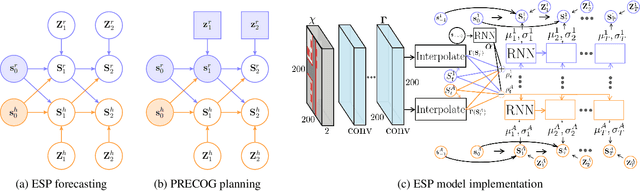
For autonomous vehicles (AVs) to behave appropriately on roads populated by human-driven vehicles, they must be able to reason about the uncertain intentions and decisions of other drivers from rich perceptual information. Towards these capabilities, we present a probabilistic forecasting model of future interactions of multiple agents. We perform both standard forecasting and conditional forecasting with respect to the AV's goals. Conditional forecasting reasons about how all agents will likely respond to specific decisions of a controlled agent. We train our model on real and simulated data to forecast vehicle trajectories given past positions and LIDAR. Our evaluation shows that our model is substantially more accurate in multi-agent driving scenarios compared to existing state-of-the-art. Beyond its general ability to perform conditional forecasting queries, we show that our model's predictions of all agents improve when conditioned on knowledge of the AV's intentions, further illustrating its capability to model agent interactions.