 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoordination and Trajectory Prediction for Vehicle Interactions via Bayesian Generative Modeling
Paper and Code
May 02, 2019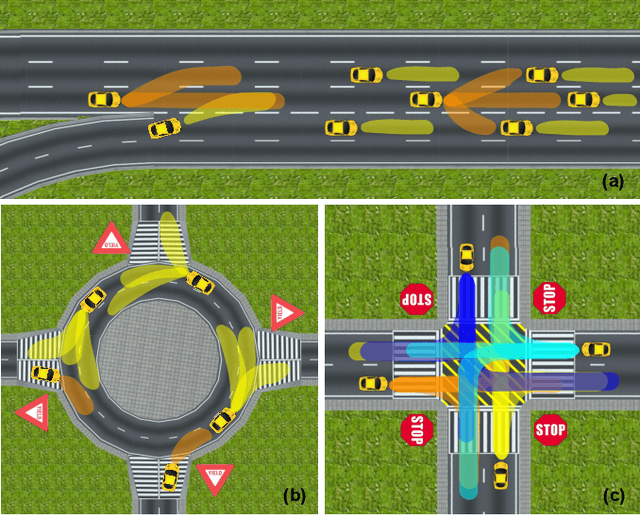
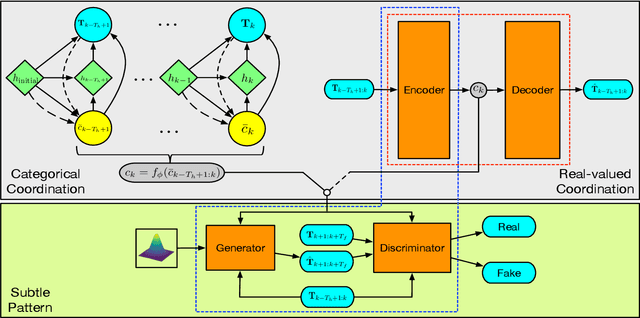
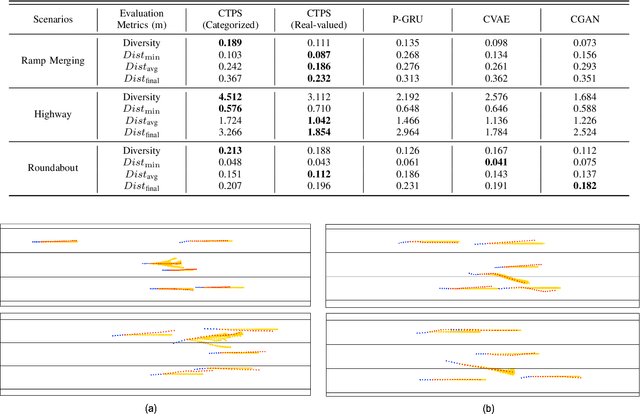
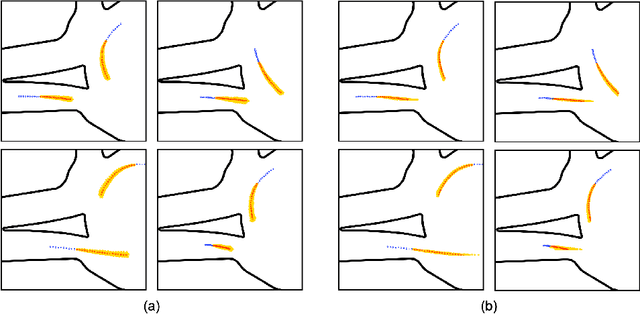
Coordination recognition and subtle pattern prediction of future trajectories play a significant role when modeling interactive behaviors of multiple agents. Due to the essential property of uncertainty in the future evolution, deterministic predictors are not sufficiently safe and robust. In order to tackle the task of probabilistic prediction for multiple, interactive entities, we propose a coordination and trajectory prediction system (CTPS), which has a hierarchical structure including a macro-level coordination recognition module and a micro-level subtle pattern prediction module which solves a probabilistic generation task. We illustrate two types of representation of the coordination variable: categorized and real-valued, and compare their effects and advantages based on empirical studies. We also bring the ideas of Bayesian deep learning into deep generative models to generate diversified prediction hypotheses. The proposed system is tested on multiple driving datasets in various traffic scenarios, which achieves better performance than baseline approaches in terms of a set of evaluation metrics. The results also show that using categorized coordination can better capture multi-modality and generate more diversified samples than the real-valued coordination, while the latter can generate prediction hypotheses with smaller errors with a sacrifice of sample diversity. Moreover, employing neural networks with weight uncertainty is able to generate samples with larger variance and diversity.