 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScene Memory Transformer for Embodied Agents in Long-Horizon Tasks
Paper and Code
Mar 09, 2019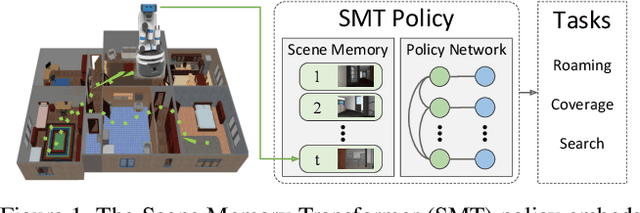
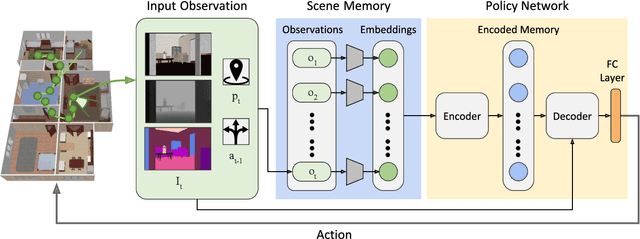
Many robotic applications require the agent to perform long-horizon tasks in partially observable environments. In such applications, decision making at any step can depend on observations received far in the past. Hence, being able to properly memorize and utilize the long-term history is crucial. In this work, we propose a novel memory-based policy, named Scene Memory Transformer (SMT). The proposed policy embeds and adds each observation to a memory and uses the attention mechanism to exploit spatio-temporal dependencies. This model is generic and can be efficiently trained with reinforcement learning over long episodes. On a range of visual navigation tasks, SMT demonstrates superior performance to existing reactive and memory-based policies by a margin.