 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoboCSE: Robot Common Sense Embedding
Paper and Code
Mar 01, 2019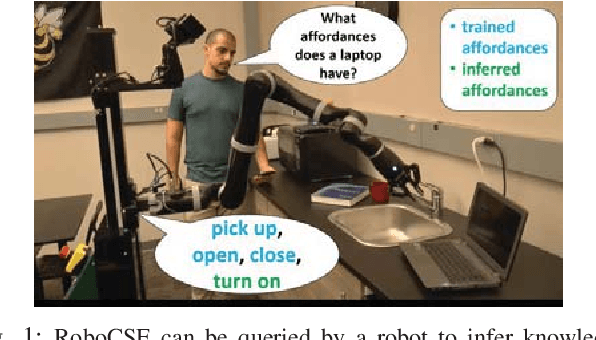
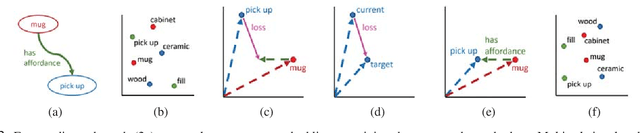
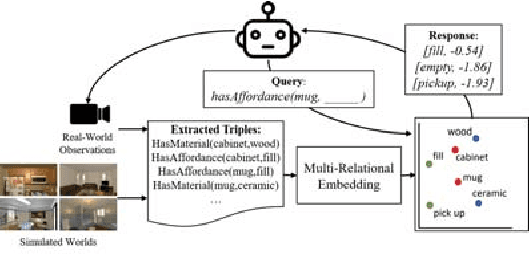
Autonomous service robots require computational frameworks that allow them to generalize knowledge to new situations in a manner that models uncertainty while scaling to real-world problem sizes. The Robot Common Sense Embedding (RoboCSE) showcases a class of computational frameworks, multi-relational embeddings, that have not been leveraged in robotics to model semantic knowledge. We validate RoboCSE on a realistic home environment simulator (AI2Thor) to measure how well it generalizes learned knowledge about object affordances, locations, and materials. Our experiments show that RoboCSE can perform prediction better than a baseline that uses pre-trained embeddings, such as Word2Vec, achieving statistically significant improvements while using orders of magnitude less memory than our Bayesian Logic Network baseline. In addition, we show that predictions made by RoboCSE are robust to significant reductions in data available for training as well as domain transfer to MatterPort3D, achieving statistically significant improvements over a baseline that memorizes training data.