 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJoint Modeling of Dense and Incomplete Trajectories for Citywide Traffic Volume Inference
Paper and Code
Feb 25, 2019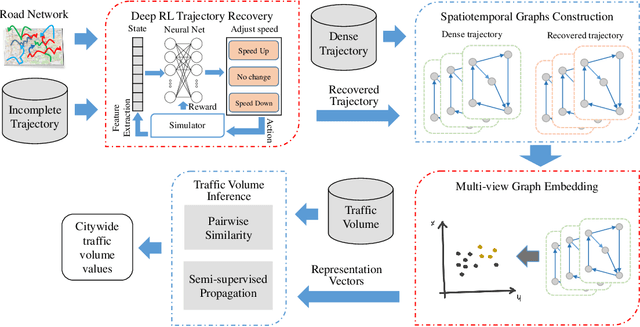
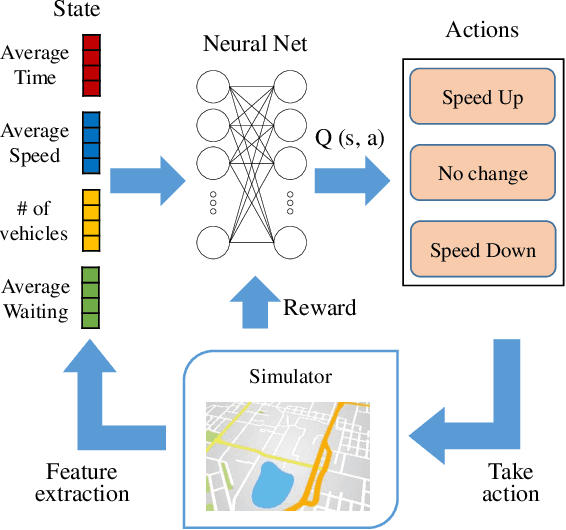
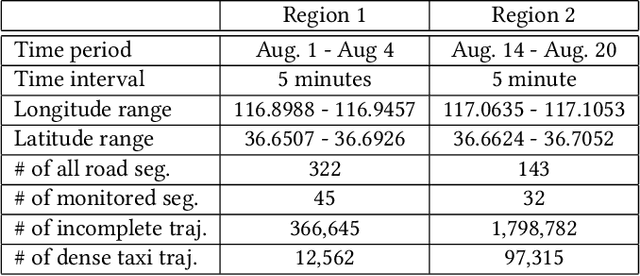
Real-time traffic volume inference is key to an intelligent city. It is a challenging task because accurate traffic volumes on the roads can only be measured at certain locations where sensors are installed. Moreover, the traffic evolves over time due to the influences of weather, events, holidays, etc. Existing solutions to the traffic volume inference problem often rely on dense GPS trajectories, which inevitably fail to account for the vehicles which carry no GPS devices or have them turned off. Consequently, the results are biased to taxicabs because they are almost always online for GPS tracking. In this paper, we propose a novel framework for the citywide traffic volume inference using both dense GPS trajectories and incomplete trajectories captured by camera surveillance systems. Our approach employs a high-fidelity traffic simulator and deep reinforcement learning to recover full vehicle movements from the incomplete trajectories. In order to jointly model the recovered trajectories and dense GPS trajectories, we construct spatiotemporal graphs and use multi-view graph embedding to encode the multi-hop correlations between road segments into real-valued vectors. Finally, we infer the citywide traffic volumes by propagating the traffic values of monitored road segments to the unmonitored ones through masked pairwise similarities. Extensive experiments with two big regions in a provincial capital city in China verify the effectiveness of our approach.