Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Generative Modeling of LiDAR Data
Paper and Code
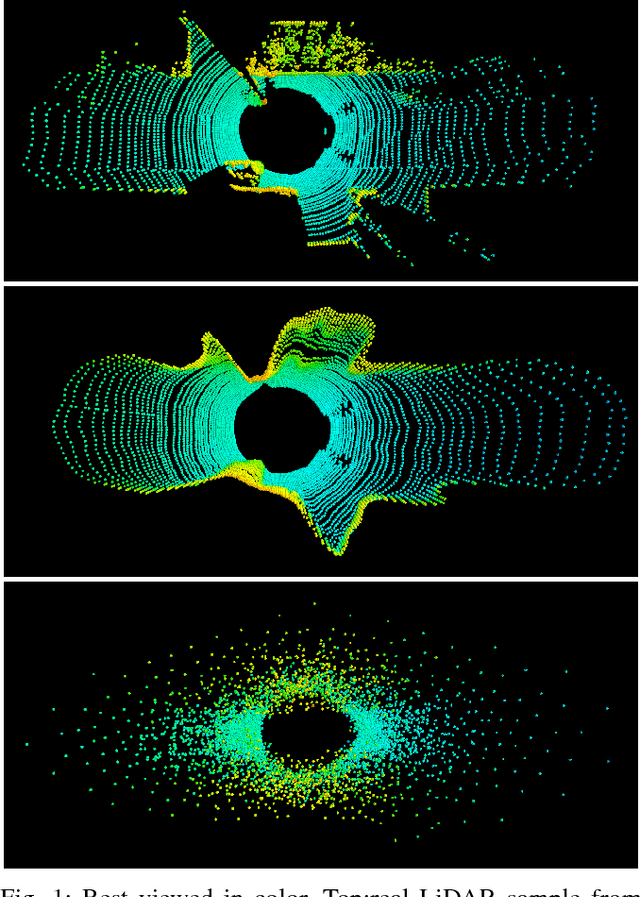

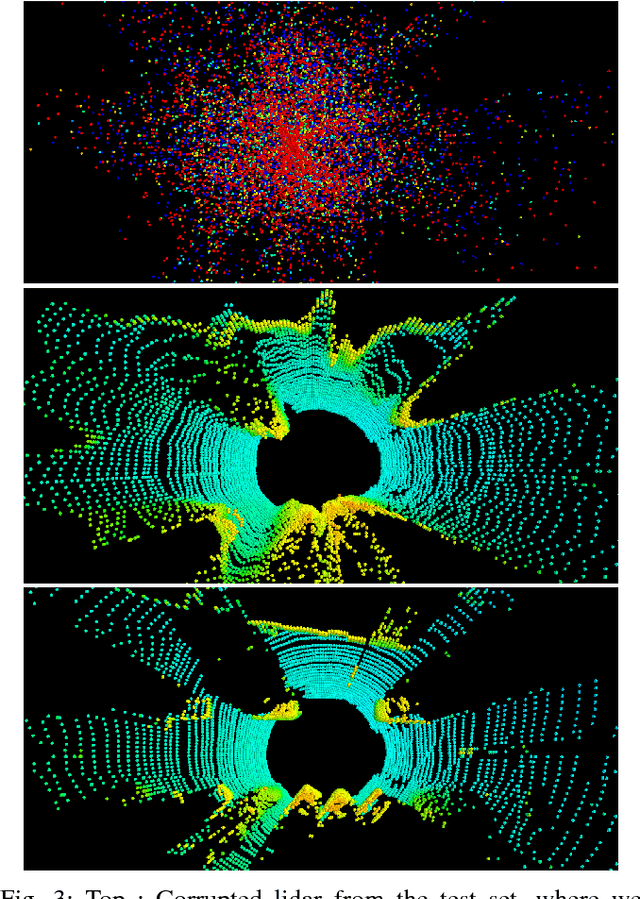
Building models capable of generating structured output is a key challenge for AI and robotics. While generative models have been explored on many types of data, little work has been done on synthesizing lidar scans, which play a key role in robot mapping and localization. In this work, we show that one can adapt deep generative models for this task by unravelling lidar scans into a multi-channel 2D signal. Our approach can generate high quality samples, while simultaneously learning a meaningful latent representation of the data. Furthermore, we demonstrate that our method is robust to noisy input - the learned model can recover the underlying lidar scan from seemingly uninformative data.
View paper on