 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIterative Transformer Network for 3D Point Cloud
Paper and Code
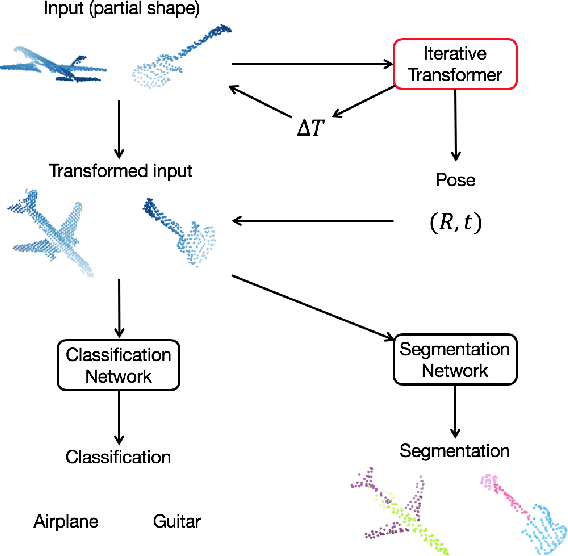
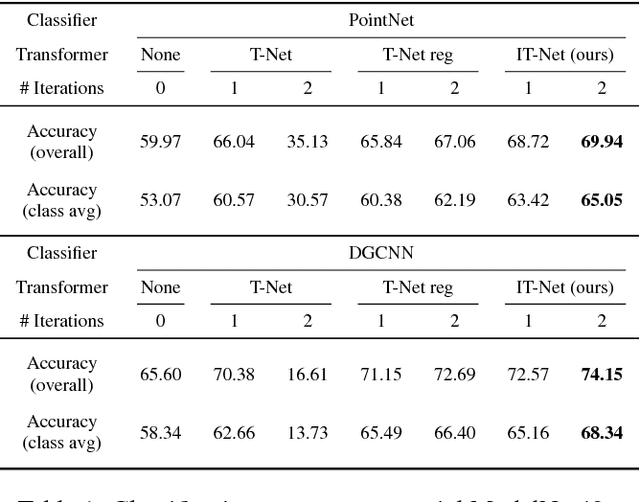
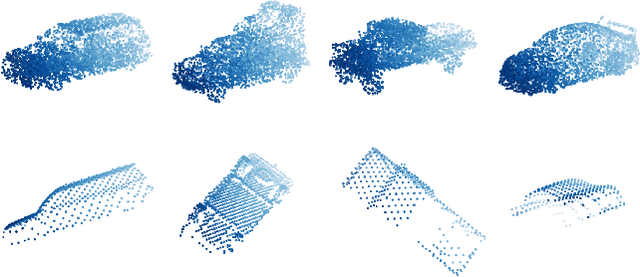
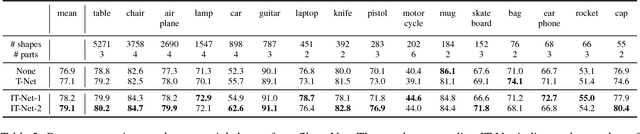
3D point cloud is an efficient and flexible representation of 3D structures. Recently, neural networks operating on point clouds have shown superior performance on tasks such as shape classification and part segmentation. However, performance on these tasks are evaluated using complete, aligned shapes, while real world 3D data are partial and unaligned. A key challenge in learning from unaligned point cloud data is how to attain invariance or equivariance with respect to geometric transformations. To address this challenge, we propose a novel transformer network that operates on 3D point clouds, named Iterative Transformer Network (IT-Net). Different from existing transformer networks, IT-Net predicts a 3D rigid transformation using an iterative refinement scheme inspired by classical image and point cloud alignment algorithms. We demonstrate that models using IT-Net achieves superior performance over baselines on the classification and segmentation of partial, unaligned 3D shapes. Further, we provide an analysis on the efficacy of the iterative refinement scheme on estimating accurate object poses from partial observations.