 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeneric Probabilistic Interactive Situation Recognition and Prediction: From Virtual to Real
Paper and Code
Sep 09, 2018


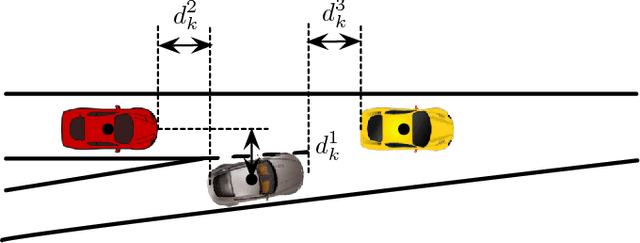
Accurate and robust recognition and prediction of traffic situation plays an important role in autonomous driving, which is a prerequisite for risk assessment and effective decision making. Although there exist a lot of works dealing with modeling driver behavior of a single object, it remains a challenge to make predictions for multiple highly interactive agents that react to each other simultaneously. In this work, we propose a generic probabilistic hierarchical recognition and prediction framework which employs a two-layer Hidden Markov Model (TLHMM) to obtain the distribution of potential situations and a learning-based dynamic scene evolution model to sample a group of future trajectories. Instead of predicting motions of a single entity, we propose to get the joint distribution by modeling multiple interactive agents as a whole system. Moreover, due to the decoupling property of the layered structure, our model is suitable for knowledge transfer from simulation to real world applications as well as among different traffic scenarios, which can reduce the computational efforts of training and the demand for a large data amount. A case study of highway ramp merging scenario is demonstrated to verify the effectiveness and accuracy of the proposed framework.