 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Robotic Eye Surgery: Marker-free, Online Hand-eye Calibration using Optical Coherence Tomography Images
Paper and Code
Aug 17, 2018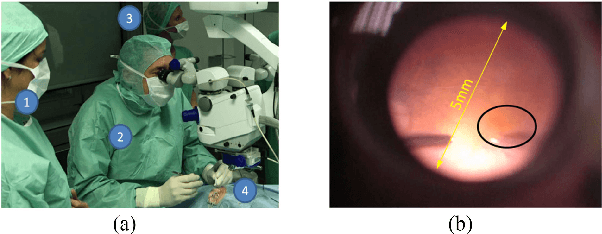
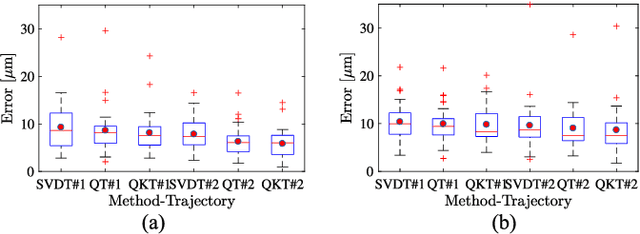
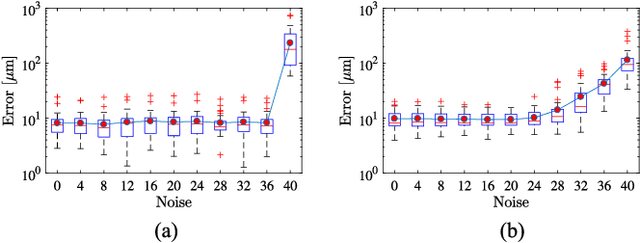
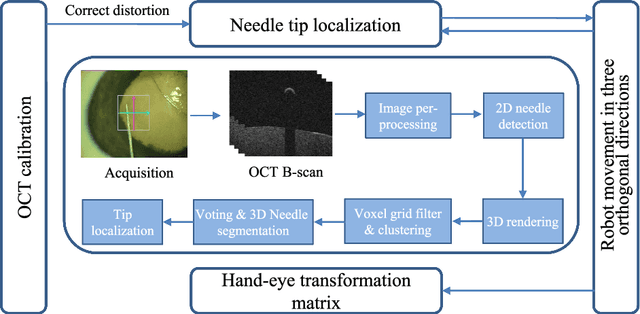
Ophthalmic microsurgery is known to be a challenging operation, which requires very precise and dexterous manipulation. Image guided robot-assisted surgery (RAS) is a promising solution that brings significant improvements in outcomes and reduces the physical limitations of human surgeons. However, this technology must be further developed before it can be routinely used in clinics. One of the problems is the lack of proper calibration between the robotic manipulator and appropriate imaging device. In this work, we developed a flexible framework for hand-eye calibration of an ophthalmic robot with a microscope-integrated Optical Coherence Tomography (MIOCT) without any markers. The proposed method consists of three main steps: a) we estimate the OCT calibration parameters; b) with micro-scale displacements controlled by the robot, we detect and segment the needle tip in 3D-OCT volume; c) we find the transformation between the coordinate system of the OCT camera and the coordinate system of the robot. We verified the capability of our framework in ex-vivo pig eye experiments and compared the results with a reference method (marker-based). In all experiments, our method showed a small difference from the marker based method, with a mean calibration error of 9.2 $\mu$m and 7.0 $\mu$m, respectively. Additionally, the noise test shows the robustness of the proposed method.