 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCourteous Autonomous Cars
Paper and Code
Aug 16, 2018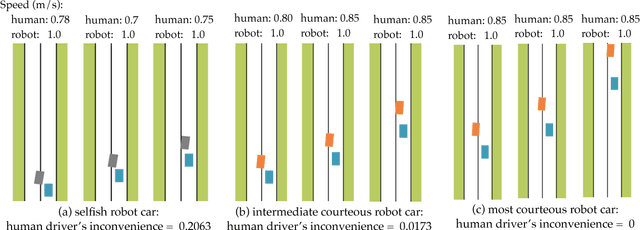
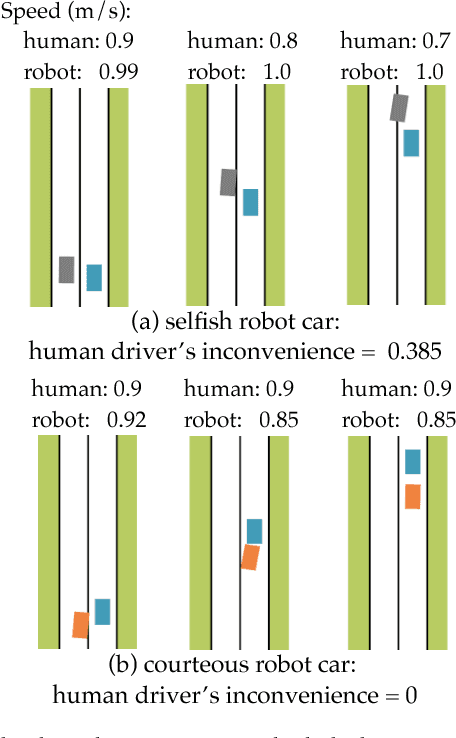
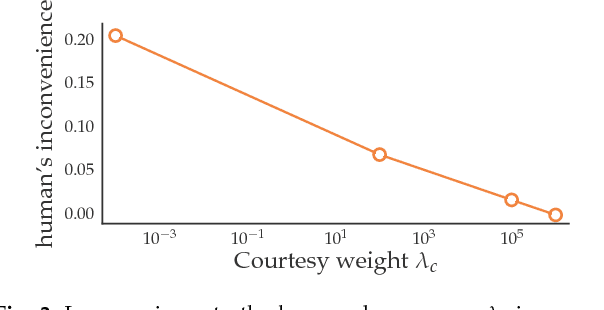
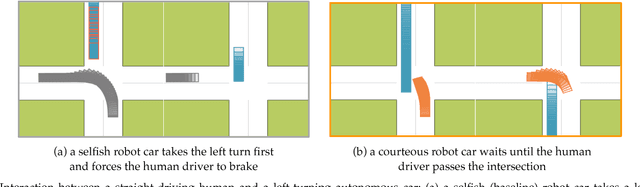
Typically, autonomous cars optimize for a combination of safety, efficiency, and driving quality. But as we get better at this optimization, we start seeing behavior go from too conservative to too aggressive. The car's behavior exposes the incentives we provide in its cost function. In this work, we argue for cars that are not optimizing a purely selfish cost, but also try to be courteous to other interactive drivers. We formalize courtesy as a term in the objective that measures the increase in another driver's cost induced by the autonomous car's behavior. Such a courtesy term enables the robot car to be aware of possible irrationality of the human behavior, and plan accordingly. We analyze the effect of courtesy in a variety of scenarios. We find, for example, that courteous robot cars leave more space when merging in front of a human driver. Moreover, we find that such a courtesy term can help explain real human driver behavior on the NGSIM dataset.