Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRapid Trajectory Optimization Using C-FROST with Illustration on a Cassie-Series Dynamic Walking Biped
Paper and Code
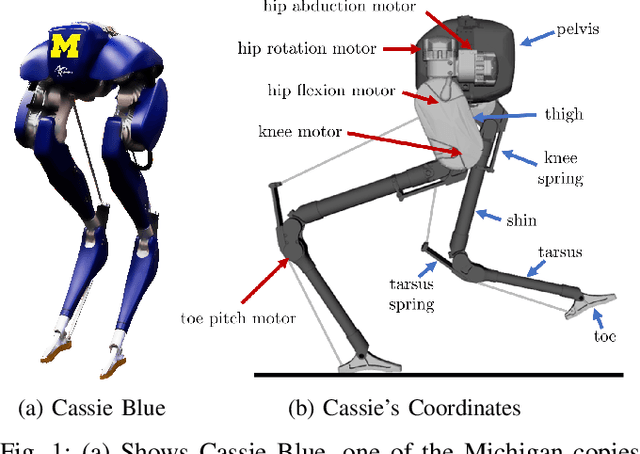
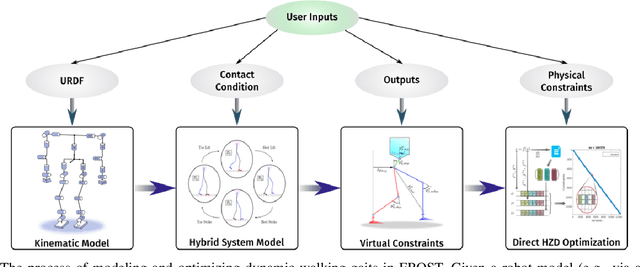
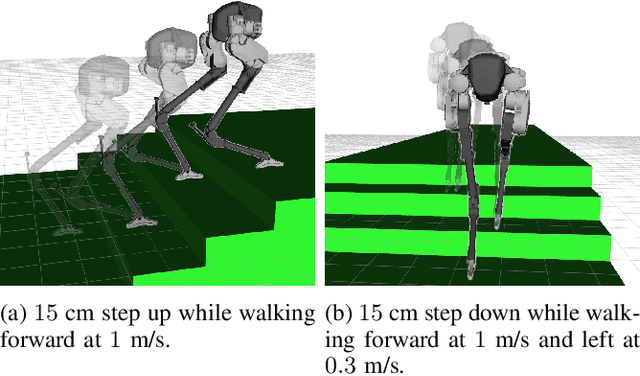
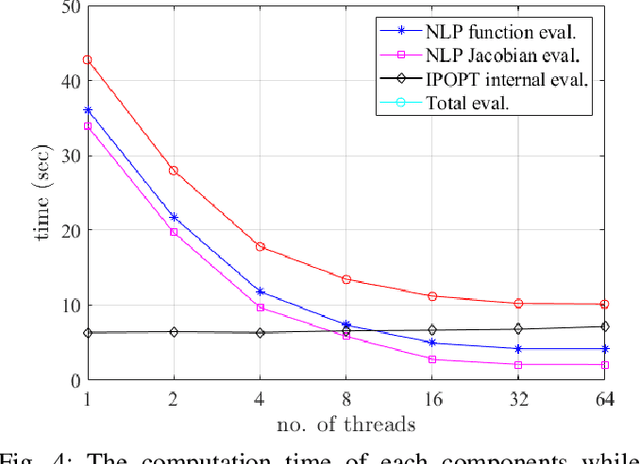
One of the big attractions of low-dimensional models for gait design has been the ability to compute solutions rapidly, whereas one of their drawbacks has been the difficulty in mapping the solutions back to the target robot. This paper presents a set of tools for rapidly determining solutions for ``humanoids'' without removing or lumping degrees of freedom. The main tools are (1) C-FROST, an open-source C++ interface for FROST, a direct collocation optimization tool; and (2) multi-threading. The results will be illustrated on a 20-DoF floating-base model for a Cassie-series bipedal robot through numerical calculations and physical experiments.
View paper on