 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Grasp Without Seeing
Paper and Code
May 10, 2018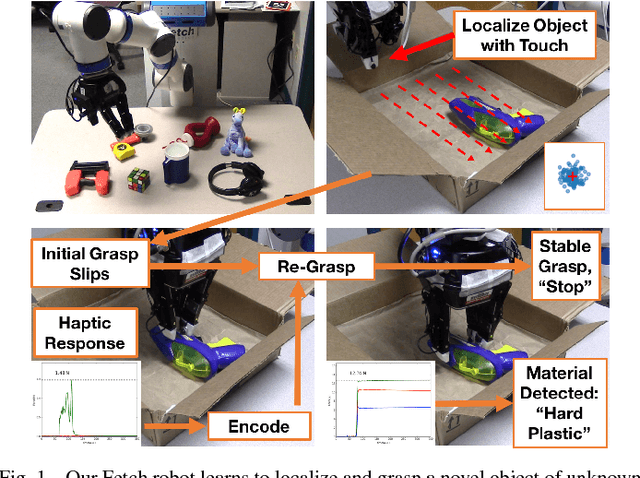
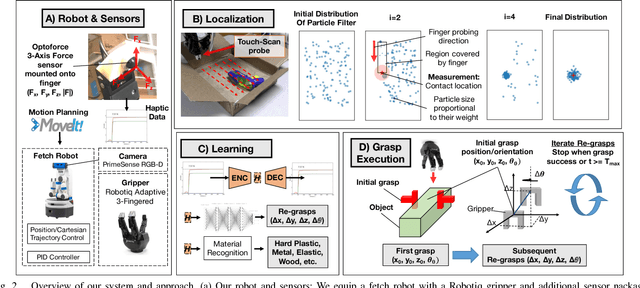
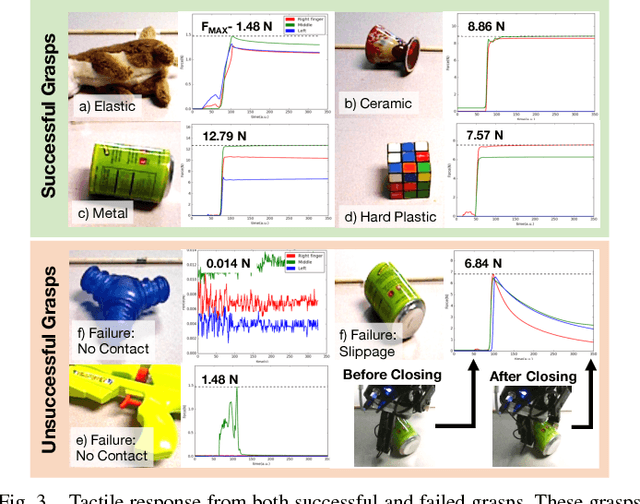
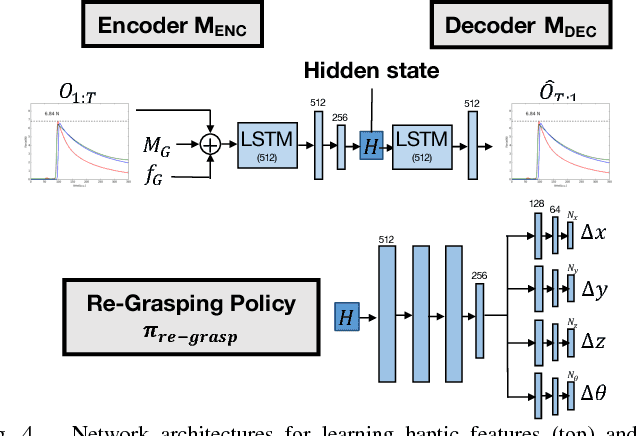
Can a robot grasp an unknown object without seeing it? In this paper, we present a tactile-sensing based approach to this challenging problem of grasping novel objects without prior knowledge of their location or physical properties. Our key idea is to combine touch based object localization with tactile based re-grasping. To train our learning models, we created a large-scale grasping dataset, including more than 30 RGB frames and over 2.8 million tactile samples from 7800 grasp interactions of 52 objects. To learn a representation of tactile signals, we propose an unsupervised auto-encoding scheme, which shows a significant improvement of 4-9% over prior methods on a variety of tactile perception tasks. Our system consists of two steps. First, our touch localization model sequentially 'touch-scans' the workspace and uses a particle filter to aggregate beliefs from multiple hits of the target. It outputs an estimate of the object's location, from which an initial grasp is established. Next, our re-grasping model learns to progressively improve grasps with tactile feedback based on the learned features. This network learns to estimate grasp stability and predict adjustment for the next grasp. Re-grasping thus is performed iteratively until our model identifies a stable grasp. Finally, we demonstrate extensive experimental results on grasping a large set of novel objects using tactile sensing alone. Furthermore, when applied on top of a vision-based policy, our re-grasping model significantly boosts the overall accuracy by 10.6%. We believe this is the first attempt at learning to grasp with only tactile sensing and without any prior object knowledge.