 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Reinforcement Learning to Acquire Navigation Skills for Wheel-Legged Robots in Complex Environments
Paper and Code
Apr 27, 2018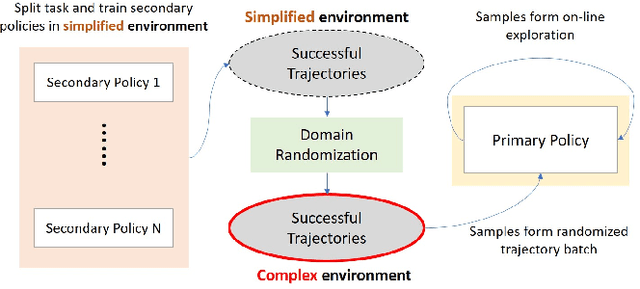
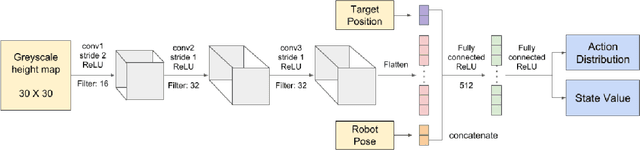
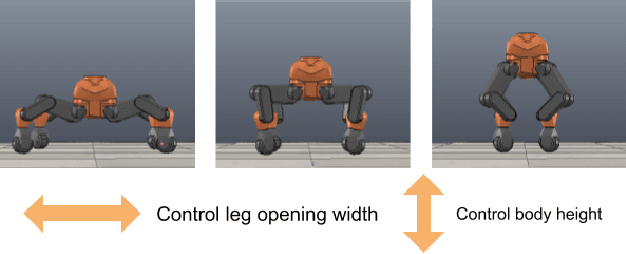

Mobile robot navigation in complex and dynamic environments is a challenging but important problem. Reinforcement learning approaches fail to solve these tasks efficiently due to reward sparsities, temporal complexities and high-dimensionality of sensorimotor spaces which are inherent in such problems. We present a novel approach to train action policies to acquire navigation skills for wheel-legged robots using deep reinforcement learning. The policy maps height-map image observations to motor commands to navigate to a target position while avoiding obstacles. We propose to acquire the multifaceted navigation skill by learning and exploiting a number of manageable navigation behaviors. We also introduce a domain randomization technique to improve the versatility of the training samples. We demonstrate experimentally a significant improvement in terms of data-efficiency, success rate, robustness against irrelevant sensory data, and also the quality of the maneuver skills.