 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Robust Dialog Policies in Noisy Environments
Paper and Code
Dec 11, 2017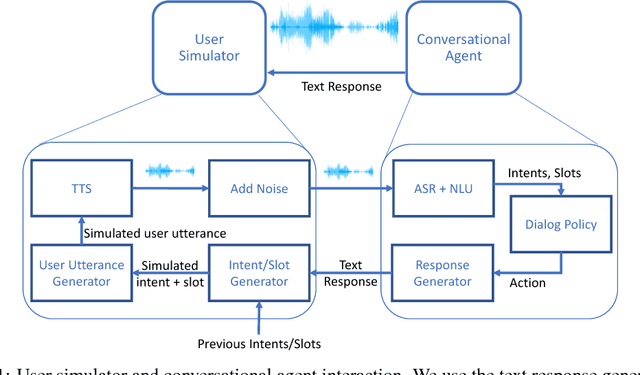
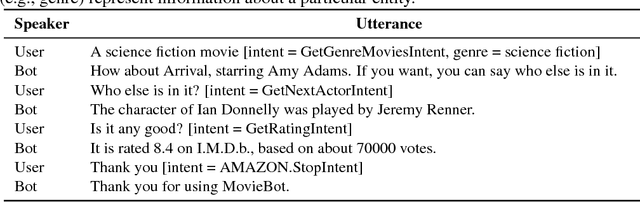
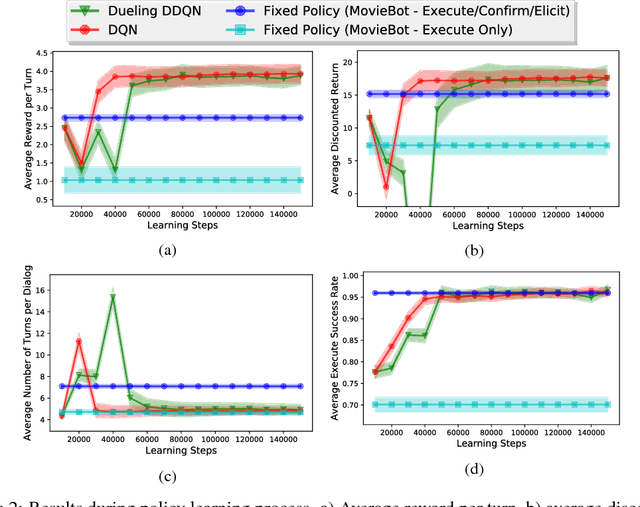
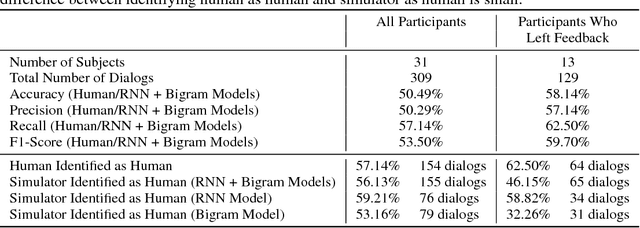
Modern virtual personal assistants provide a convenient interface for completing daily tasks via voice commands. An important consideration for these assistants is the ability to recover from automatic speech recognition (ASR) and natural language understanding (NLU) errors. In this paper, we focus on learning robust dialog policies to recover from these errors. To this end, we develop a user simulator which interacts with the assistant through voice commands in realistic scenarios with noisy audio, and use it to learn dialog policies through deep reinforcement learning. We show that dialogs generated by our simulator are indistinguishable from human generated dialogs, as determined by human evaluators. Furthermore, preliminary experimental results show that the learned policies in noisy environments achieve the same execution success rate with fewer dialog turns compared to fixed rule-based policies.