Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnsupervised Object Discovery and Segmentation of RGBD-images
Paper and Code
Oct 18, 2017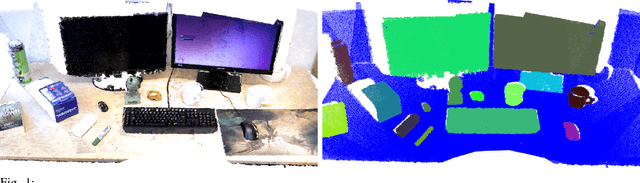

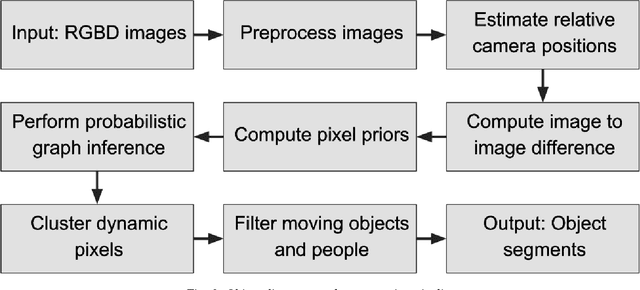

In this paper we introduce a system for unsupervised object discovery and segmentation of RGBD-images. The system models the sensor noise directly from data, allowing accurate segmentation without sensor specific hand tuning of measurement noise models making use of the recently introduced Statistical Inlier Estimation (SIE) method. Through a fully probabilistic formulation, the system is able to apply probabilistic inference, enabling reliable segmentation in previously challenging scenarios. In addition, we introduce new methods for filtering out false positives, significantly improving the signal to noise ratio. We show that the system significantly outperform state-of-the-art in on a challenging real-world dataset.
* 15 pages, 6 figures
View paper on