Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Imitation Learning for Complex Manipulation Tasks from Virtual Reality Teleoperation
Paper and Code
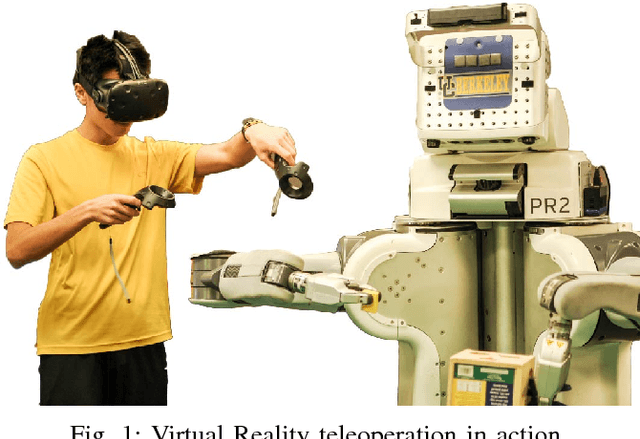

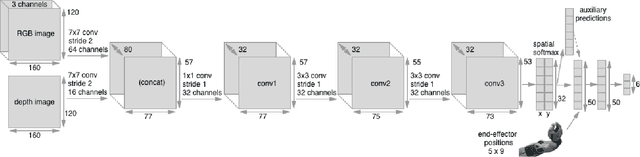
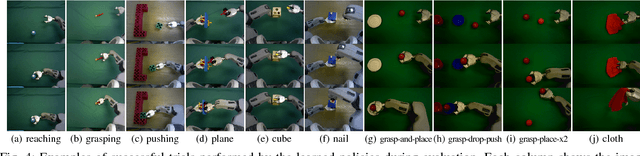
Imitation learning is a powerful paradigm for robot skill acquisition. However, obtaining demonstrations suitable for learning a policy that maps from raw pixels to actions can be challenging. In this paper we describe how consumer-grade Virtual Reality headsets and hand tracking hardware can be used to naturally teleoperate robots to perform complex tasks. We also describe how imitation learning can learn deep neural network policies (mapping from pixels to actions) that can acquire the demonstrated skills. Our experiments showcase the effectiveness of our approach for learning visuomotor skills.
* First two authors contributed equally. Video available at
https://sites.google.com/view/vrlfd/
View paper on